

Method for ensuring navigation safety of mobile robots in unknown environments
A mobile robot, unknown environment technology, applied in the field of robot navigation and artificial intelligence control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
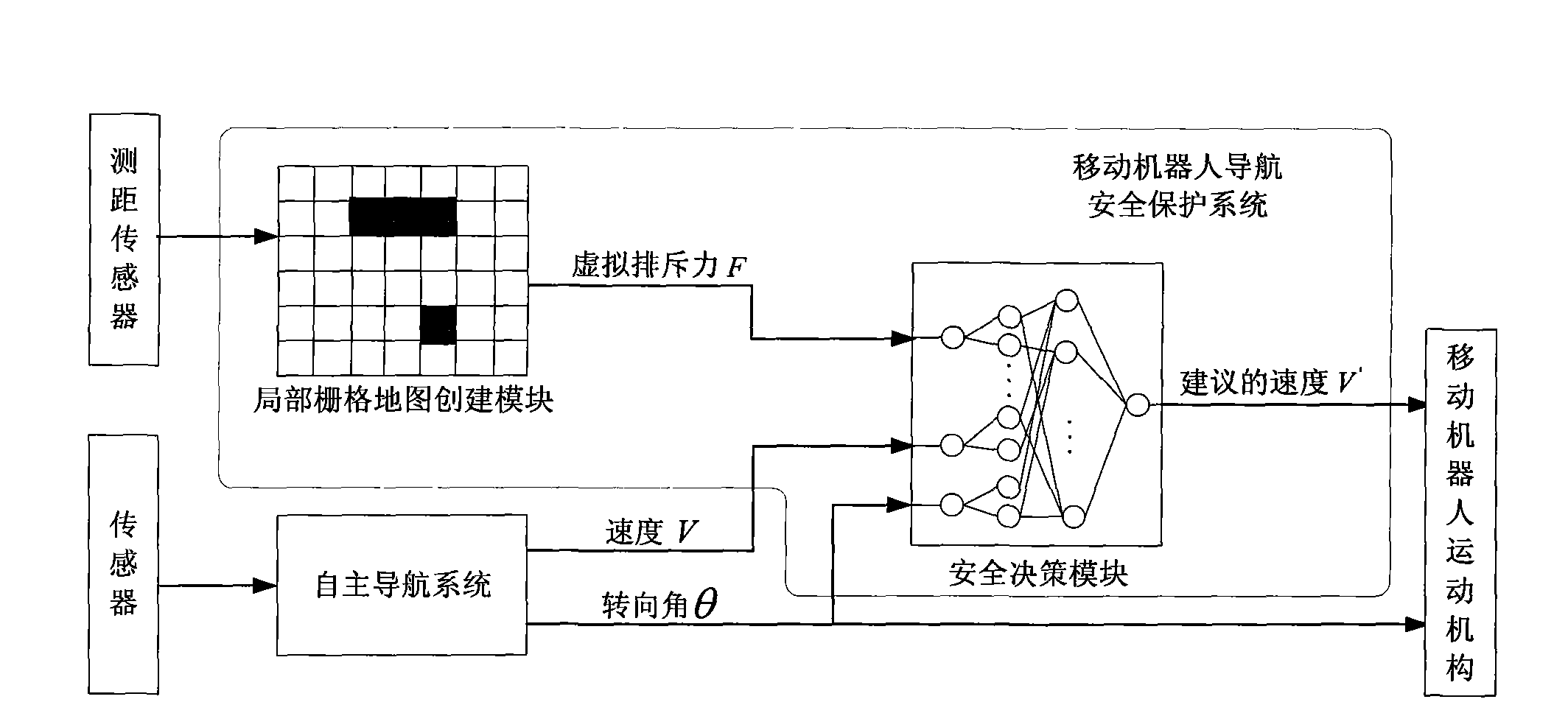
[0048] Structural block diagram of the present invention is as figure 1 shown. The mobile robot navigation safety protection system is independent of the mobile robot autonomous navigation system, and uses a separate set of ranging sensors and computers to perceive the environment and control the speed of the mobile robot. The mobile robot navigation safety protection system includes a partial grid map creation module and a safety decision-making module based on fuzzy neural network. Among them, there are three inputs to the safety decision-making module, that is, the virtual repulsion force of the current environment on the robot calculated by the local grid map and the decision information (steering angle and motion speed) of the autonomous navigation system of the mobile robot; The final velocity of the robot kinematics. The steering angle of the decision-making information of the autonomous navigation system of the mobile robot directly acts on the motion mechanism of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More