

Controller for fruit picking robot
A picking robot and controller technology, applied in picking machines, computer control, program control, etc., can solve the problems of low scalability, poor versatility, and inportability, and achieve good portability, low power consumption, and convenient control. effect of ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
[0032] The controller of the present invention is applicable to various fruits and vegetables picking robots, and the cucumber picking robot is used as an example for illustration below.
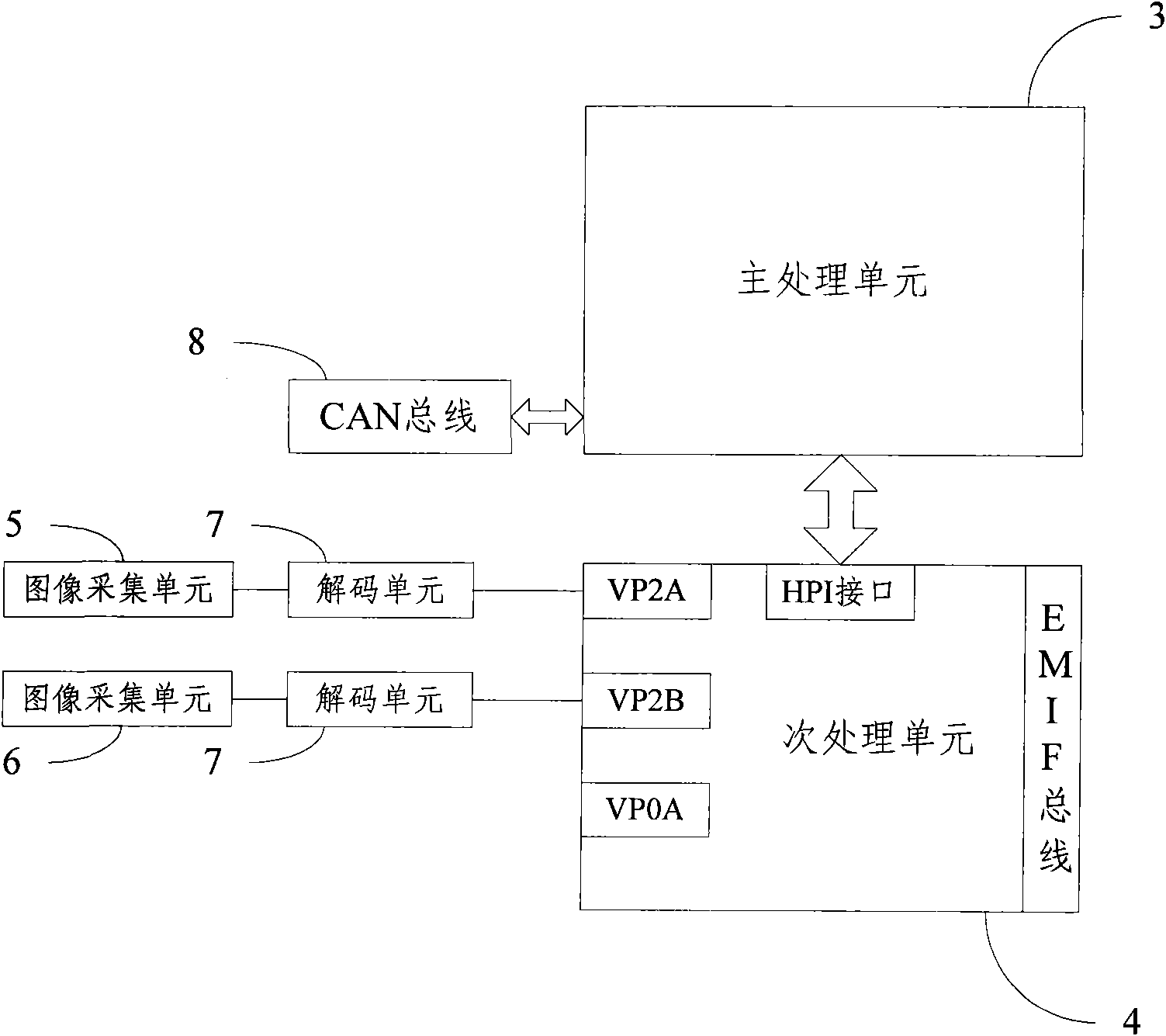
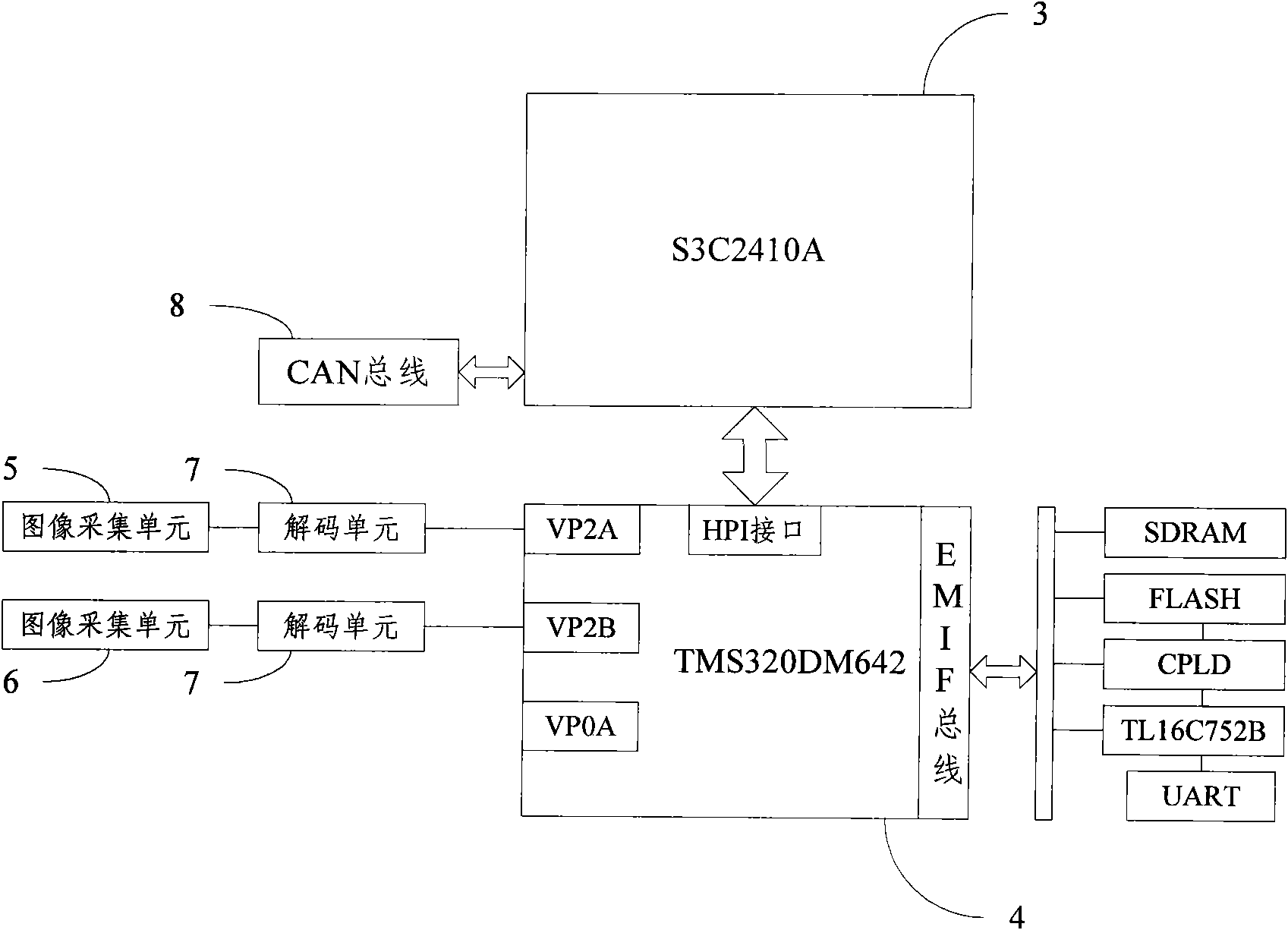
[0033] Such as figure 1 As shown, the secondary processing unit 4 selects high-performance 32-bit fixed-point DSPTMS320DM642. DM642 has powerful computing functions. It is built on the second-generation high-performance supernormal instruction word structure and can process 8 instructions in parallel. It is very suitable for digital image processing. In this hardware design, its working frequency is selected as 600MHz. According to the needs of the project, in addition to expanding the necessary memory part and video acquisition and playback part of the hardware system, it mainly expands multi-channel digital I / O and multi-channel asynchronous serial...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More