

Self-adaptive pre-control method for movable beam position of oversize water press
A technology of movable beams and hydraulic presses, which is applied to the driving device of forging presses and other directions, can solve the problems of forging dimensional accuracy control and other problems, and achieve the effect of reducing subsequent processing time, reducing energy consumption and material loss, and improving production efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
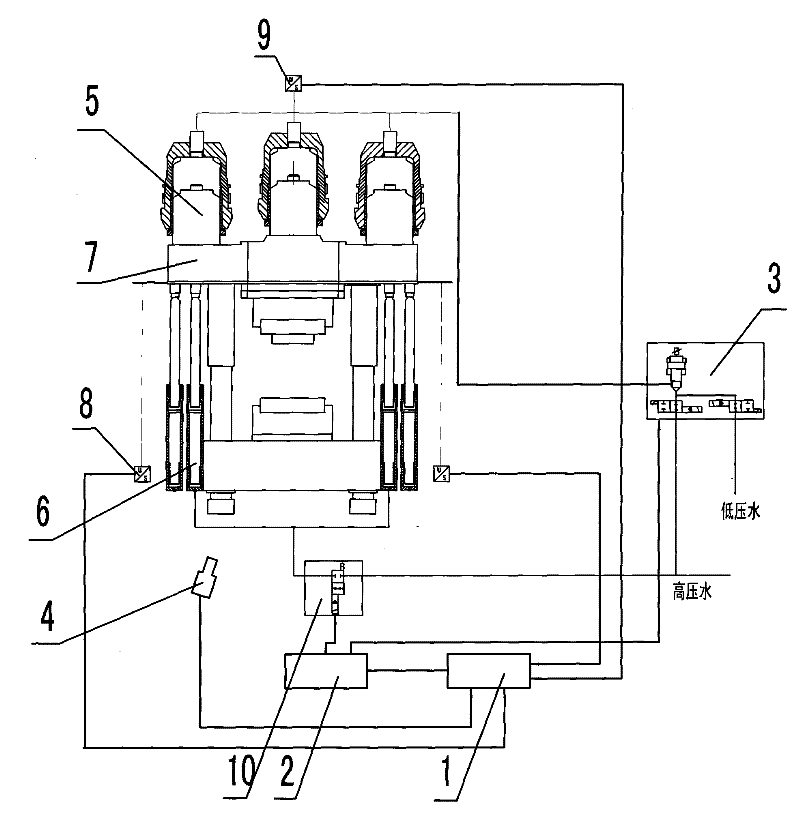
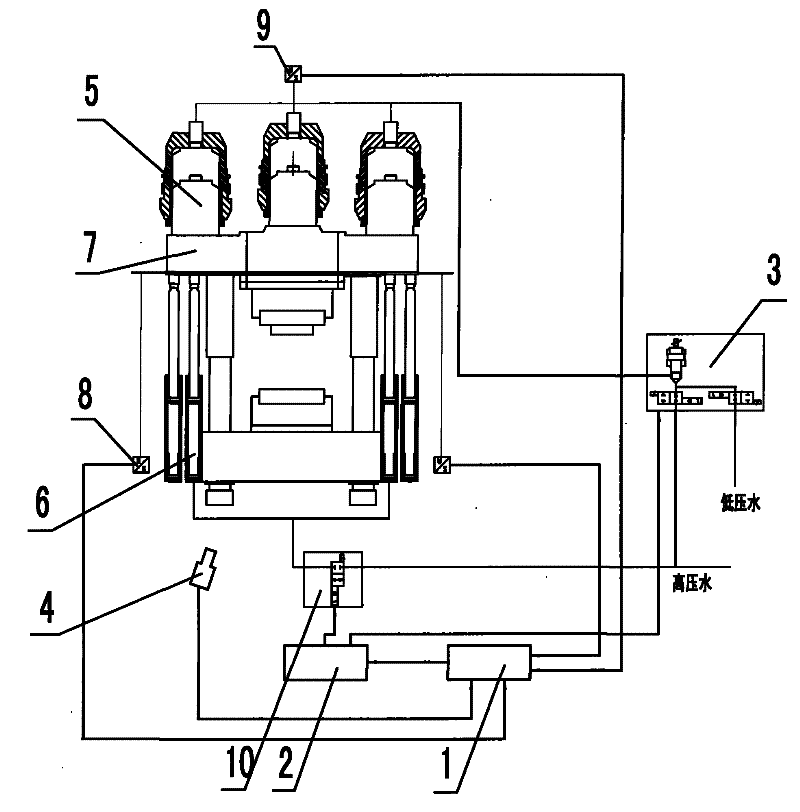
[0032] Specific embodiments of the present invention are shown in the accompanying drawings, with figure 1 Shown is a schematic diagram of the control system of the present invention, which is composed of a programmable controller 1, an executive control element 2, a main working cylinder control valve 3, a temperature sensor 4, a main working cylinder 5, a return cylinder 6, a movable beam 7, a displacement sensor 8, Composed of the main working cylinder pressure sensor 9 and the return cylinder high pressure control valve 10;
[0033] The steps of the self-adaptive pre-control method for the position of the movable beam of the extra-large hydraulic press are as follows:
[0034] In the first step, during the first forging process, the position of the movable beam during the forging process is measured in real time through the displacement sensor 8 and the running speed is calculated, the forging pressure is measured through the main working cylinder pressure sensor 9, and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More