

Piezoelectric type six-dimensional force sensor
A six-dimensional force sensor and sensor technology, which is applied to the measurement of the force of the piezoelectric device, can solve the problems of large size, high installation accuracy requirements, and high positioning accuracy, and achieve the effect of simple structure and reduced processing technology requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
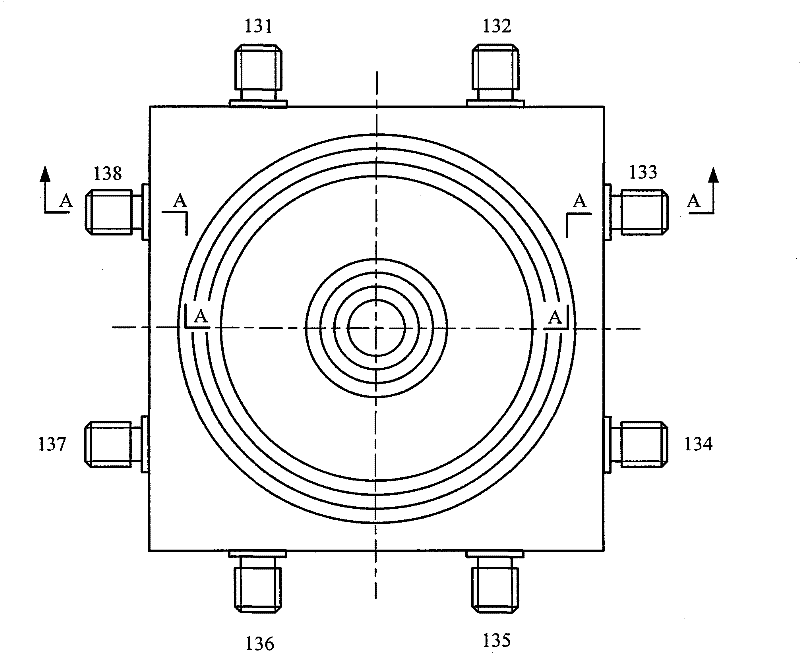
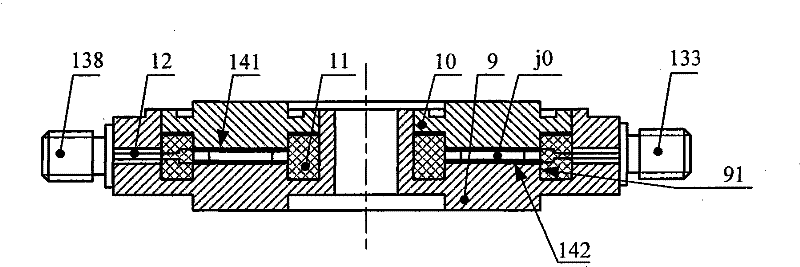
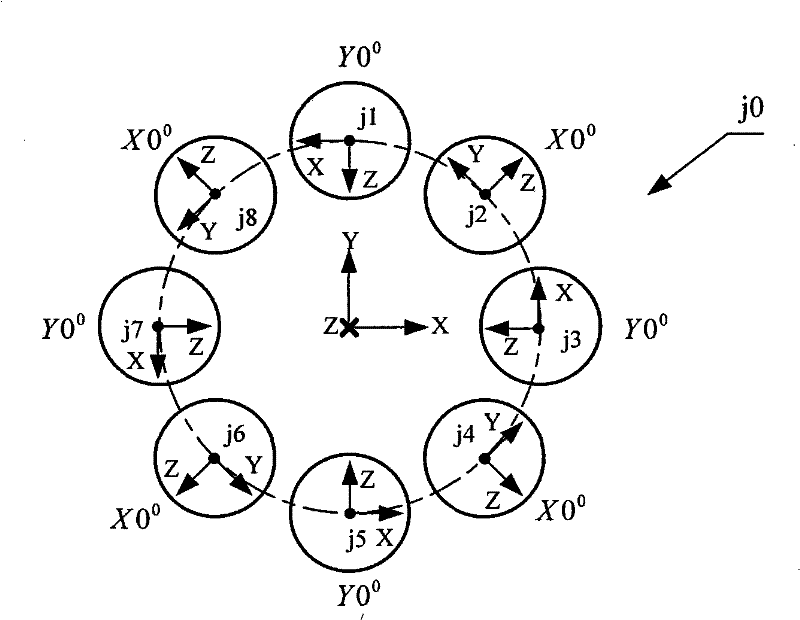
[0012] A piezoelectric six-dimensional force sensor (reference figure 1 , 2 ), the sensor includes a base 9 with a mounting plate 91 inside and a socket outside, which is clamped by two upper and lower insulating electrode plates (141, 142) and mounted on the mounting plate 91 in the base 9 The dynamometer j0, the cover 10 pressed on the upper insulating electrode plate 141, the signal lead 12 that connects the electrodes of the insulating electrode plate (141, 142) with the socket, and the signal lead 12 that is fixed and insulated to isolate the signal lead 12. Insulating filler material 11 . Among them, the force measuring moment j0 is composed of several quartz wafers; the base 9 and the cover 10 are welded together by electron beam welding technology. In the present invention, there are only eight quartz wafers (j1-j8) constituting the force measuring moment meter j0 (refer to image 3 ), the eight quartz wafers (j1~j8) are evenly arranged on the circumference of a ref...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More