

High-precision local wireless positioning system
A wireless positioning system and high-precision technology, applied in radio wave measurement systems, positioning, measuring devices, etc., can solve the problems of complex antenna array structure, low accuracy, short propagation time, etc., to suppress white noise interference and ensure positioning accuracy. , the effect of increasing system capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with the accompanying drawings.
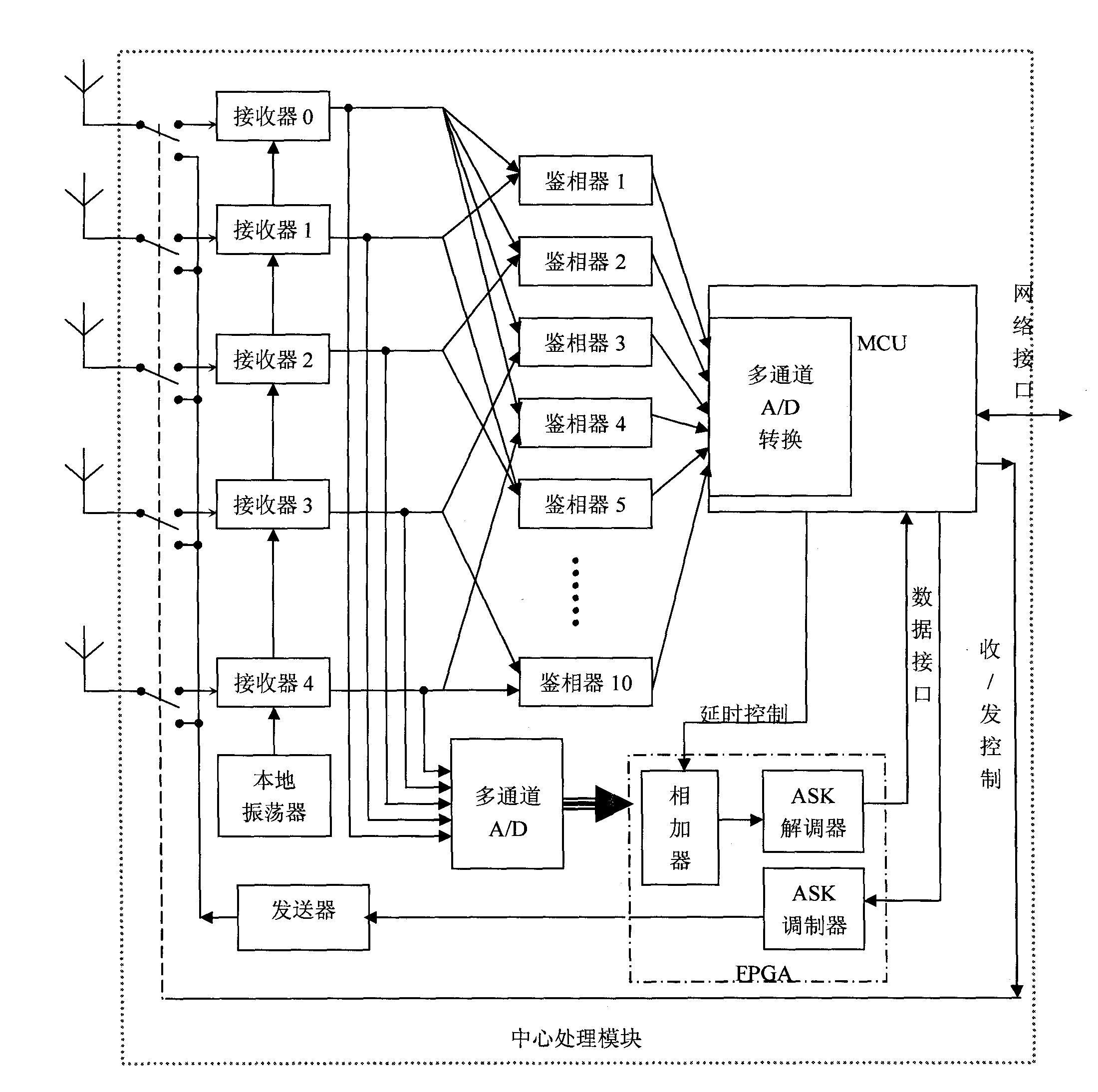
[0036] Such as figure 1 As shown, a high-precision local wireless positioning system of the present invention includes an anchor node 1, a positioned target node 2, and a central processing module 3. The anchor node 1 includes an apex anchor node and a central anchor node, and the apex anchor node is deployed near the target node. On the vertices of the polygon at the edge of the positioning area, the central anchor node is close to the central processing module 3 deployed at the center of the polygon, and each anchor node 1 is connected to the central processing module 3 respectively. In this system, five positioning anchor nodes are placed in the center of the plane to be positioned, four of which are placed at the four vertices of the square, and the other anchor node is placed at the center of the square, and the vertex anchor nodes are placed as close as possible ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More