

Self-adaptive filtering device of master-slave minimally-invasive surgery robot system
An adaptive filtering, robotic system technology, applied in surgical robotics, surgery, applications, etc., can solve problems such as instability, time-varying signals, lack of spatial locality, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
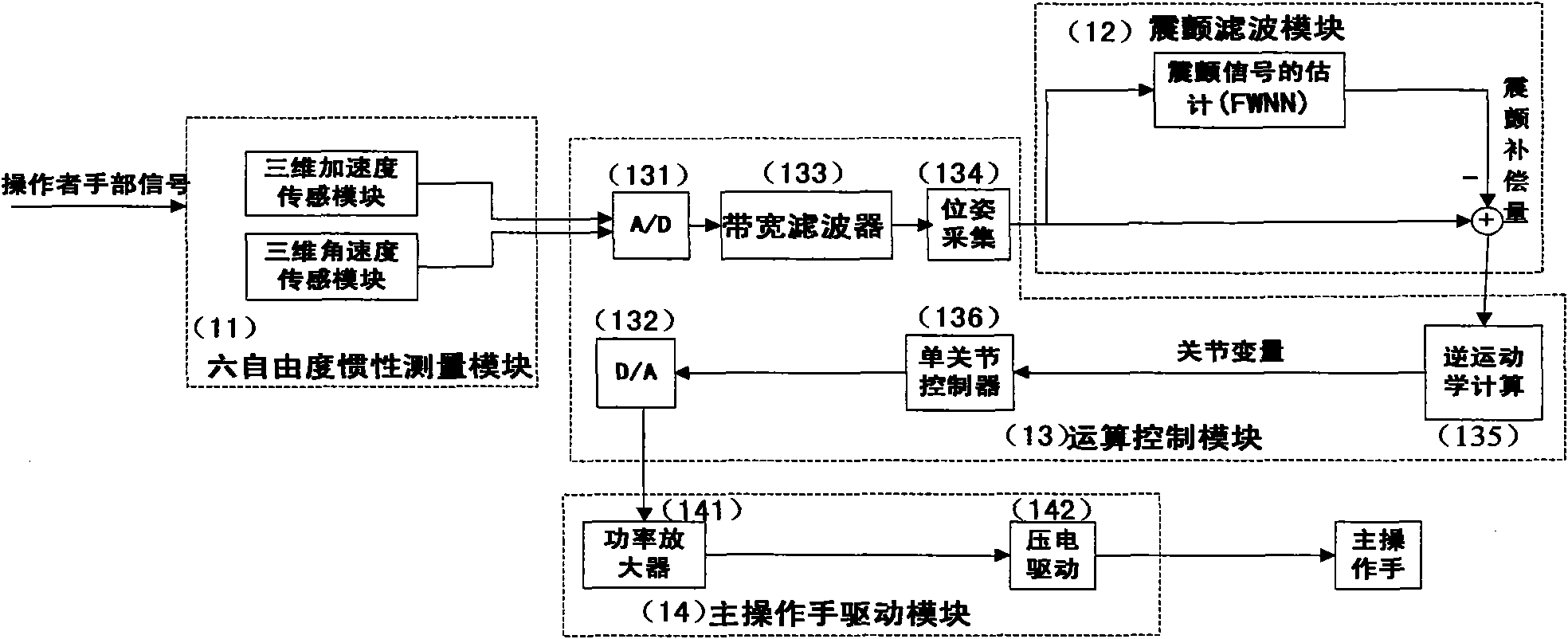
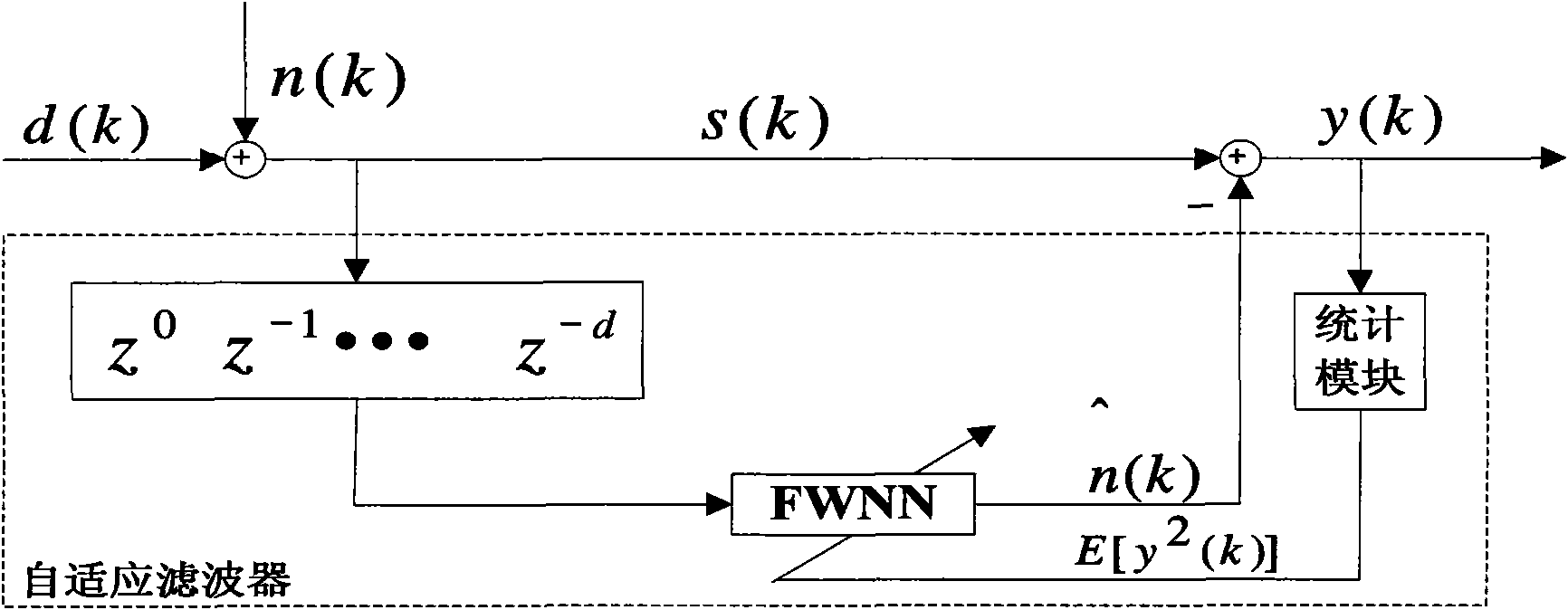
[0030] The invention relates to an adaptive filtering device for filtering out hand tremor behavior of minimally invasive surgery operators. Based on the approximation ability of fuzzy wavelet neural network (FWNN) to arbitrary nonlinear functions, the off-line construction of hand tremor behavior of surgical operators Mode, and can generate a compensation signal with the same amplitude and frequency as the tremor signal but opposite in phase, so as to achieve the purpose of filtering the tremor signal.
[0031] The hand tremor behavior adaptive filter device designed by the minimally invasive surgery operator designed by the present invention will be described in detail below in conjunction with the accompanying drawings and specific examples.
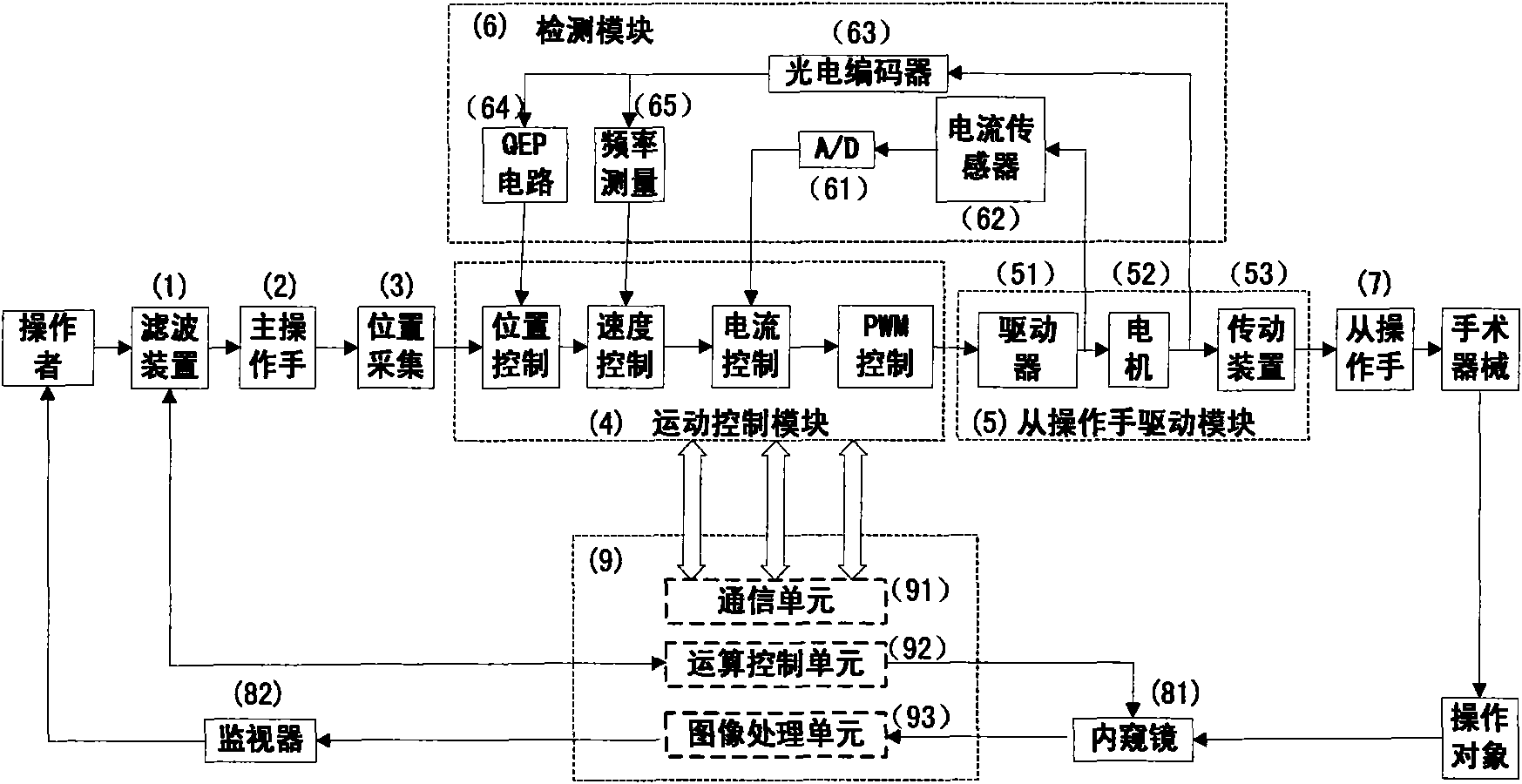
[0032] figure 1 It is an overall block diagram of the master-slave minimally invasive surgical robot system according to the present invention. exist figure 1 The surgical operator plans the operation steps in advance according to t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More