

Visual computing and prewarning method of deviation angle and distance of automobile from lane line
A technology of visual computing and lane lines, applied in computing, computer components, alarms, etc., can solve problems such as complex models, large amount of computing, and strong environmental dependence, and achieve improved computing speed, strong anti-interference ability, and improved The effect of accuracy
Inactive Publication Date: 2010-11-24
CHONGQING UNIV
View PDF5 Cites 92 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0006] Aiming at the shortcomings of the existing early warning method for vehicle deviation, the model is complex, the amount of calculation is large, and the environment is highly dependent, the purpose of the present invention is to provide a visual calculation and early warning method for the angle and distance of the vehicle deviation from the lane line. The method utilizes image analysis technology Complete the lane detection, and use the visual calculation method to obtain the spatial position and driving direction of the car relative to the road lane line, as the early warning information of the car deviation in intelligent driving
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples



Examples
Experimental program
Comparison scheme
Effect test
Embodiment approach
[0033] (a) Install a CCD video camera along the front of the car, adjust the depression angle and focal length to make a clear image of the road within 50m ahead, and record the installation height h and depression angle θ of the camera, see Figure 4 .
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
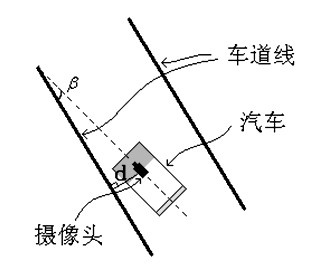
The invention relates to a visual computing and prewarning method of deviation angle and distance of an automobile from a lane line. The image processing and computer vision technologies are utilized, and the deviation angle and distance of the automobile from the lane line are computed in real time according to the road surface image acquired by a vehicle-mounted camera, thereby estimating the line crossing time for safety prewarning. The method comprises the following steps: detecting the lane lines of the road surface image to obtain a linear equation of partial lane lines; establishing a three-dimensional coordinate system by using the camera as the initial point, and recording the mounting height and depression angle of the camera; calibrating the focal length according to the lane detection result under the condition of a given deflection angle; computing the deflection angle and vertical distance of the automobile relative to the lane line according to a pinhole camera model; and estimating the deviation time from the lane according to the instantaneous running speed of the automobile, thereby obtaining the safety prewarning or intelligent control information of the running automobile.
Description
technical field [0001] The invention relates to a fast calculation and safety warning method for real-time calculation of the angle and distance of a vehicle deviating from a lane line based on road surface images acquired by a vehicle-mounted camera by applying image processing and computer vision technology. First, lane line detection is performed on the road surface image to obtain the linear equation of the local lane line; a three-dimensional coordinate system is established with the camera as the origin, and the installation height and depression angle of the camera are recorded; the focal length is calibrated, and then the vehicle relative The deflection angle and vertical distance of the lane line, the estimated time to leave the lane, and provide effective information for safety warning or intelligent control in car driving. Background technique [0002] In recent years, the autonomous driving technology of automobiles has developed rapidly and has gradually made pr...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): G06K9/62G06T7/00G06K9/20G08B21/02B60R11/04
Inventor毛玉星徐少志何为张占龙余星锐
OwnerCHONGQING UNIV