

Remote numerical control multipurpose uphill and downhill trolley
A technology of uphill and downhill and trolley, which is applied in the direction of electrical program control, sequence/logic controller program control, motor vehicles, etc. It can solve the problems of single function, large number of trolleys, and inability to attach hoists or fixtures, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
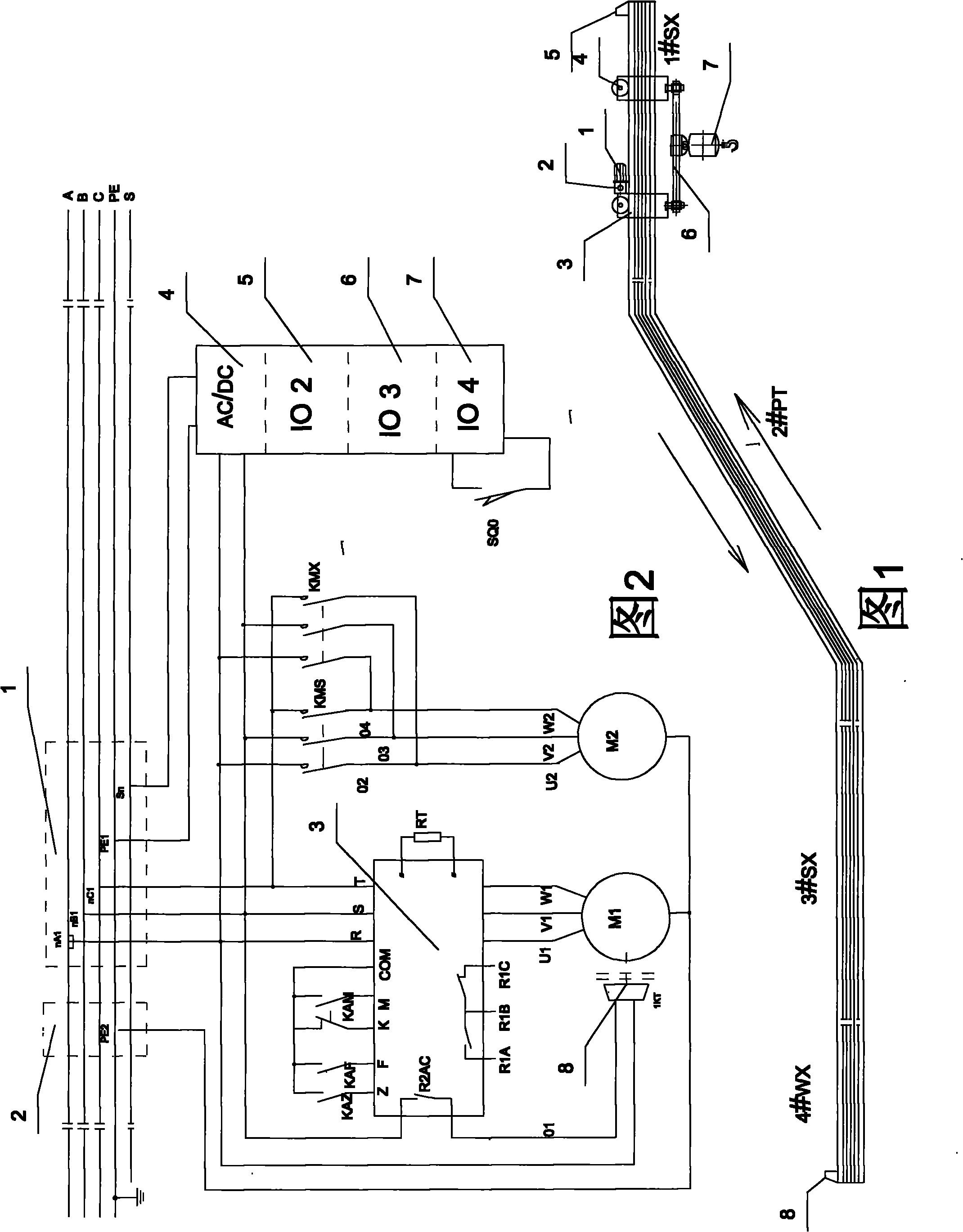
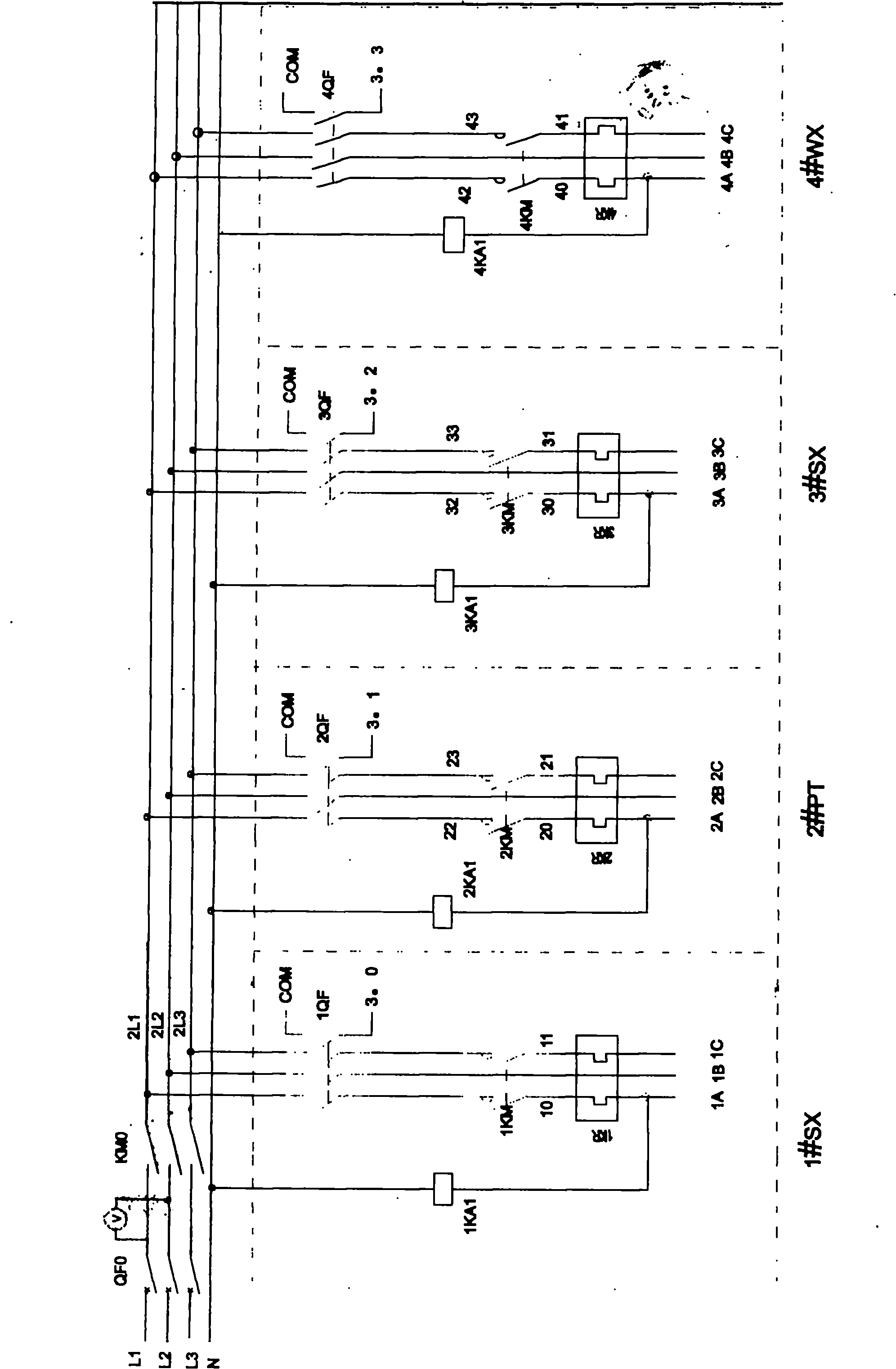
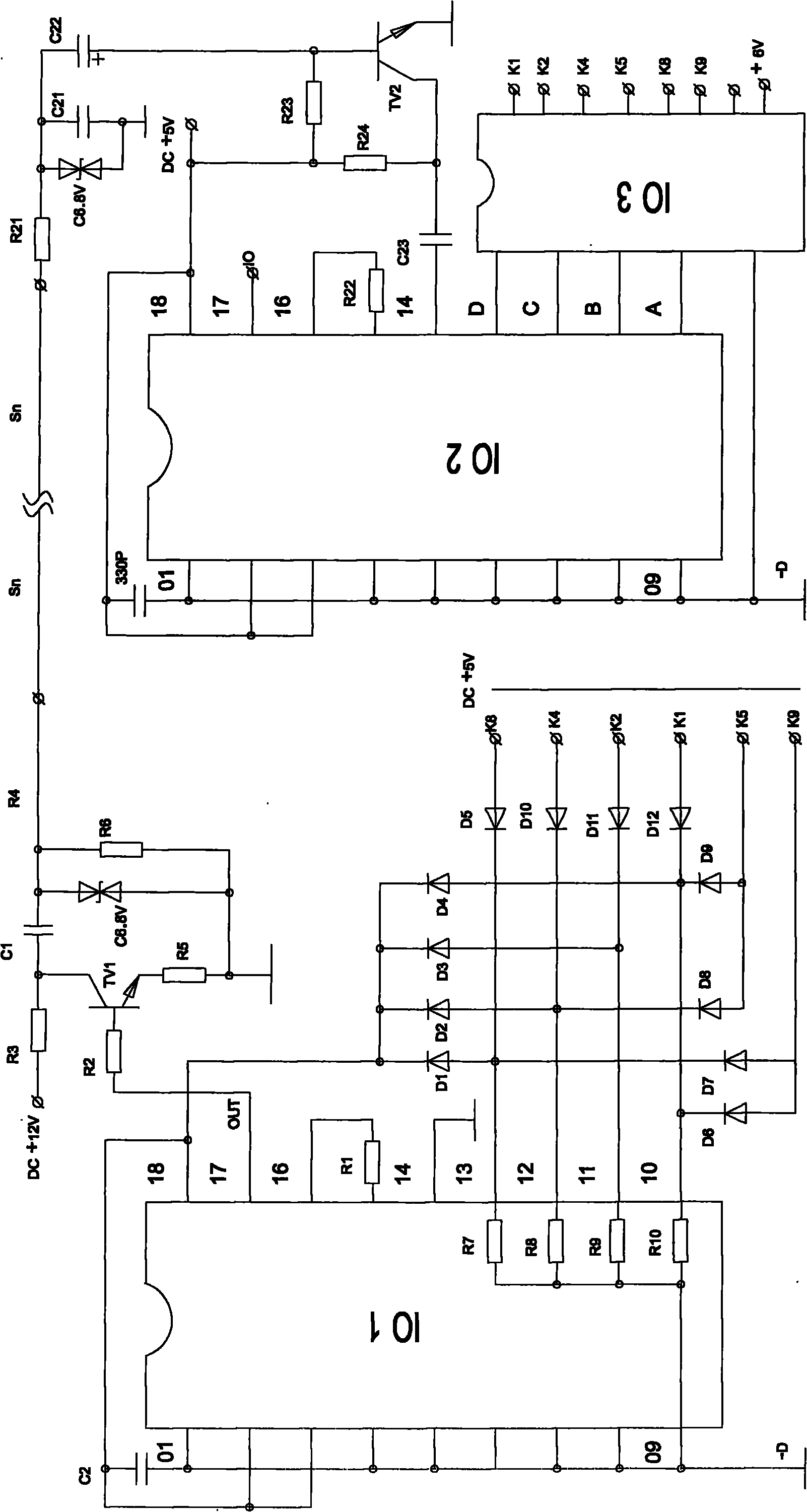
[0021] For specific embodiments of the present invention see figure 1, 1#SX and 3#SX are the loading and unloading stations; 2#PT is the up and down ramp; 4#WX is the maintenance station. Among them, 1 is the traveling motor of the trolley; 2 is the reducer; 3 is the main car of the trolley; 4 is the auxiliary car of the trolley; 5 and 8 are limit safety blocks; The electric hoist that puts material; 9, five slide contact lines that are contained in track side. In addition, there is also a set of gear electromagnetic brake mechanism on the frame, a set of electric control box with the car, a power step-down and rectification device in the box, a control signal decoding and feedback signal encoding integrated circuit board, and a frequency converter , 5 AC contactors, each of which is connected to the main control cabinet through a brush-sliding line-cable. There are 5 sets of AC contactors installed in the main control cabinet on the ground; and a set of four-module PLC, fou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More