

Flywheel based attitude maneuvering control device and method for successive approaching of satellite rounding instantaneous Euler shaft
A technology of successive approximation and Euler axis, which is applied in the direction of the guidance device of the aerospace vehicle, can solve the problems of the complex configuration of the jet control system, the difficulty in reducing the volume and weight of the satellite, and the short service life of the satellite, so as to improve the utilization rate, Lightweight, low cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
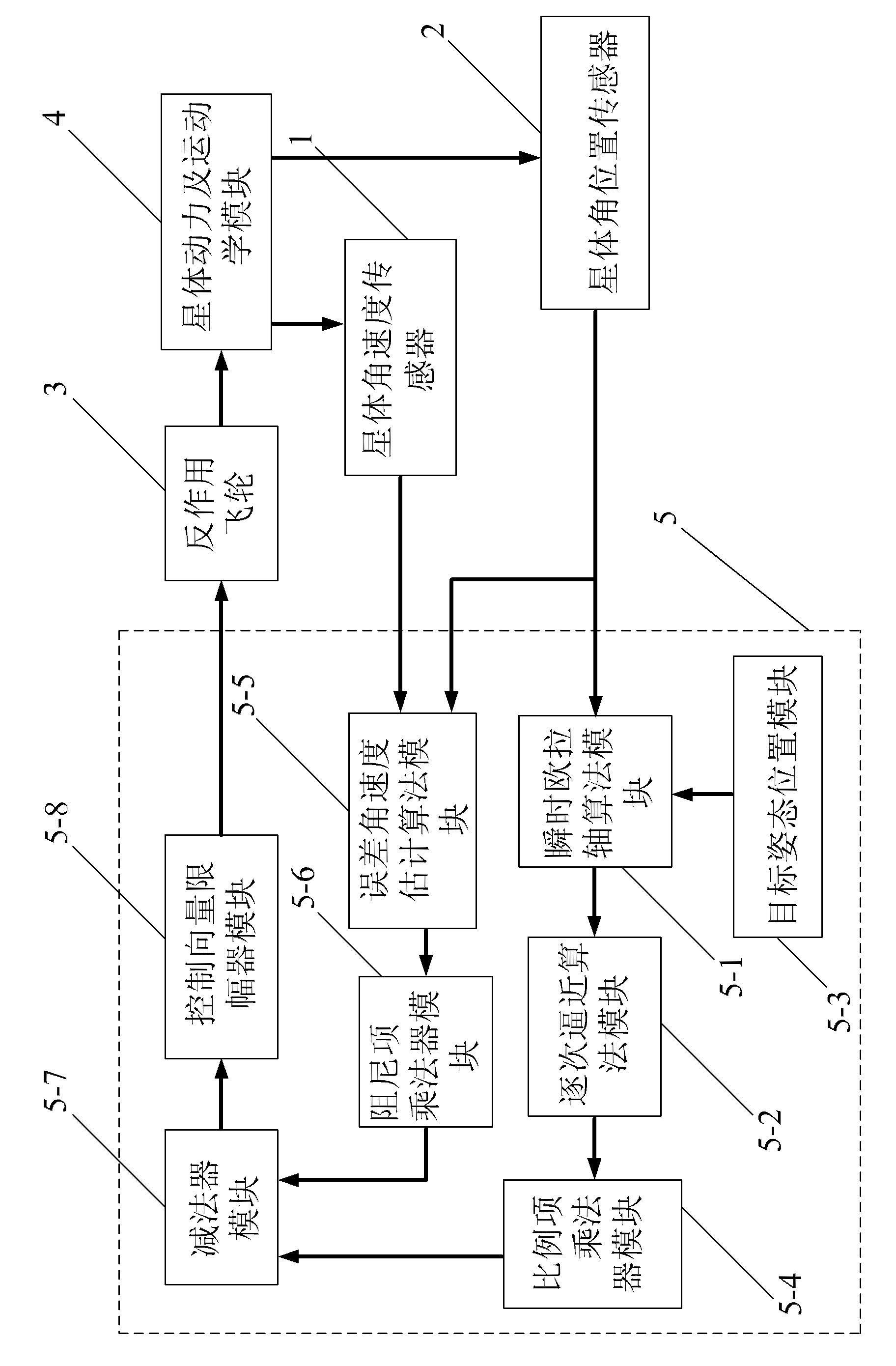
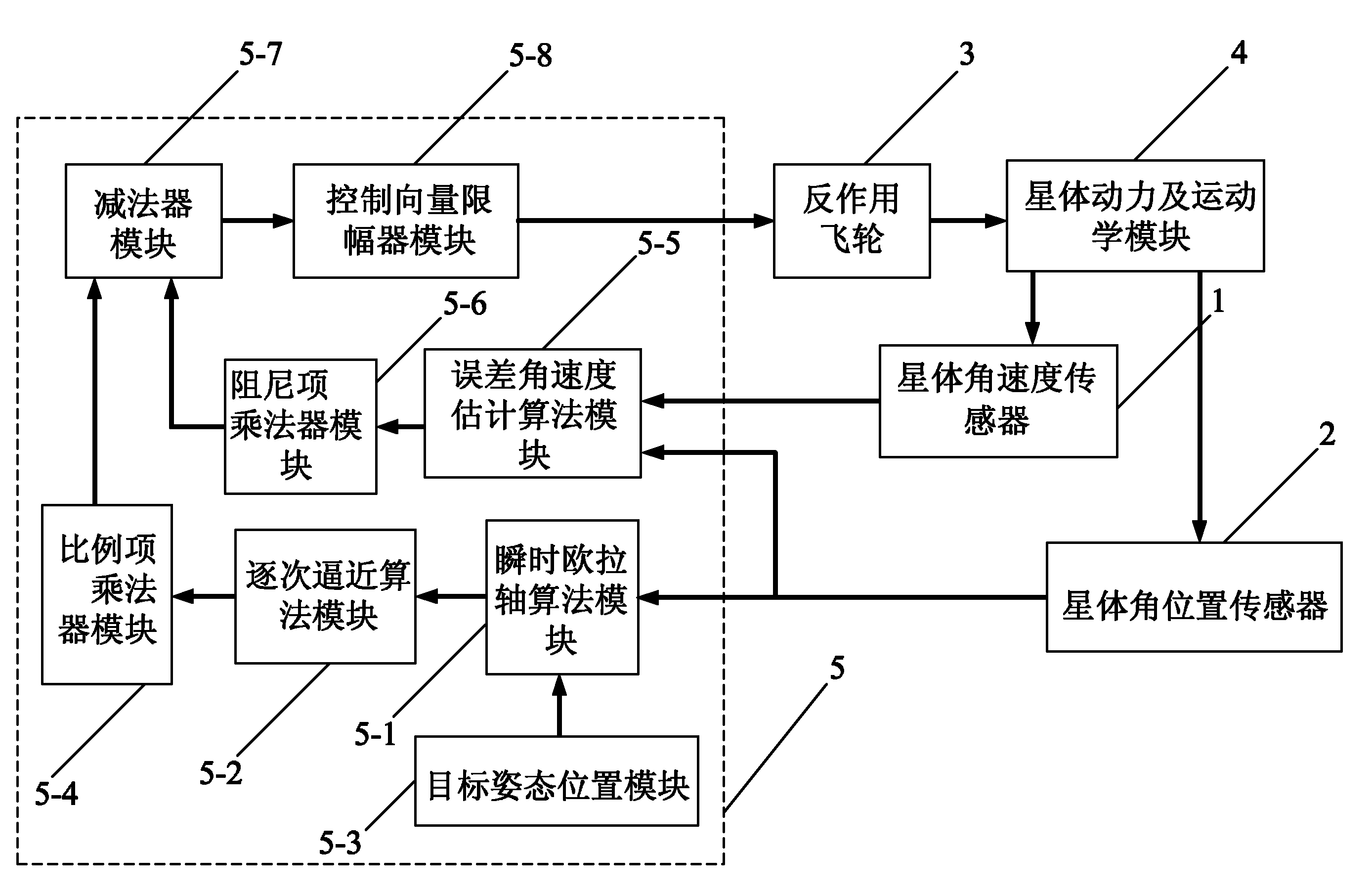
[0040] Specific implementation mode one: combine figure 1 Describe this embodiment, this embodiment comprises star angular velocity sensor 1, star angular position sensor 2 and reaction flywheel 3; It also comprises on-board control assembly 5, and described on-board control assembly 5 includes instantaneous Euler axis algorithm module 5-1 , successive approximation algorithm module 5-2, target attitude position module 5-3, proportional term Kp multiplier module 5-4, error angular velocity estimation algorithm module 5-5, damping term Kd multiplier module 5-6 and subtractor 5- 7;
[0041] The star angular velocity sensor 1 is used to detect the angular velocity of the star, and the detected angular velocity data is sent to the error angular velocity estimation algorithm module 5-5 in the onboard control assembly 5;
[0042] The star angular position sensor 2 is used to detect the angular position of the star, and simultaneously sends the detected angular position data to the ...
specific Embodiment approach 2
[0052] Specific implementation mode two: combination figure 1 Describe this embodiment, the difference between this embodiment and the specific embodiment is that it also increases the control vector limiter module 5-8; the control vector limiter module 5-8 is used to receive the subtractor 5-7 to send flywheel control data command, and perform vector clipping, and send the flywheel control data command after vector clipping. Other compositions and connection methods are the same as those in Embodiment 1.
specific Embodiment approach 3
[0053] Specific embodiment three: adopt the control method that the satellite based on flywheel described in specific embodiment one or two approaches the attitude maneuvering control device successively around the instantaneous Euler axis, it is realized by the following algorithm:
[0054] First, set the parameters of the control device according to the system requirements of the control device. The parameters to be designed are: Kd, Kp, Limit60,
[0055] where Kd=diag([Kdx Kdy Kdz] T ), parameter Kd is satellite controller differential coefficient matrix: Kp=diag ([KpxKpy Kpz] T ): The parameter Kp is the proportional coefficient matrix of the satellite controller, and the design principle is:
[0056] Kp=Ib*Wc 2 , formula one
[0057] Kd=2Ib*keci*Wc, Formula 2
[0058] The parameter Limit60 is the upper limit coefficient for limiting the maneuvering angular velocity during the satellite capture phase; the design value of Limit60 is:
[0059] Limit60=2keci*WLimit / Wc, F...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More