

Ankle joint device of lower limb rehabilitation training robot
A technology for rehabilitation training and ankle joints, applied in muscle training equipment, gymnastics equipment, passive exercise equipment, etc., can solve the problems of secondary injury of patients' lower limbs, high cost of sensors, large structural size, etc., and achieve cost and structural size advantages , compact overall structure, high safety and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
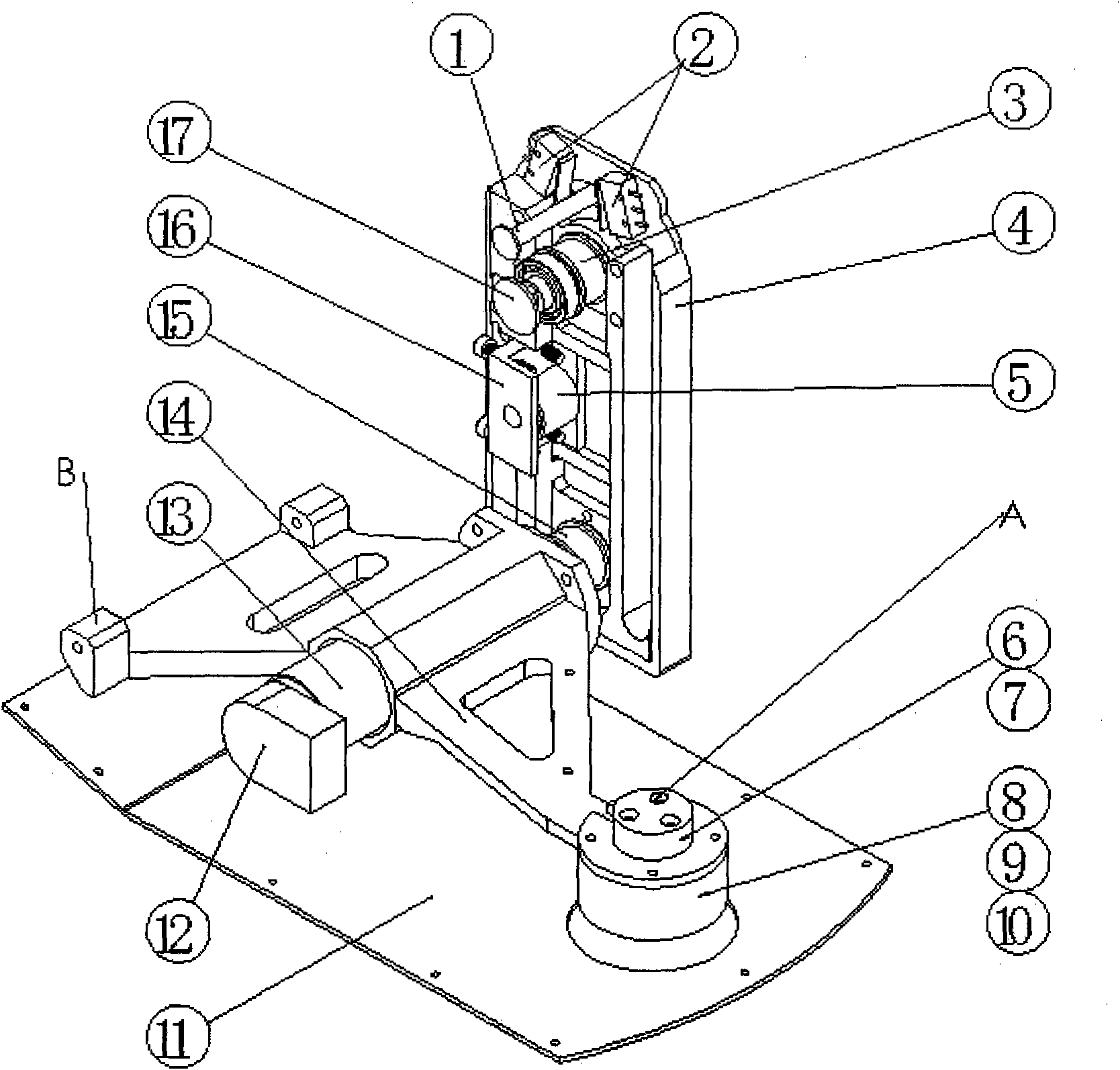
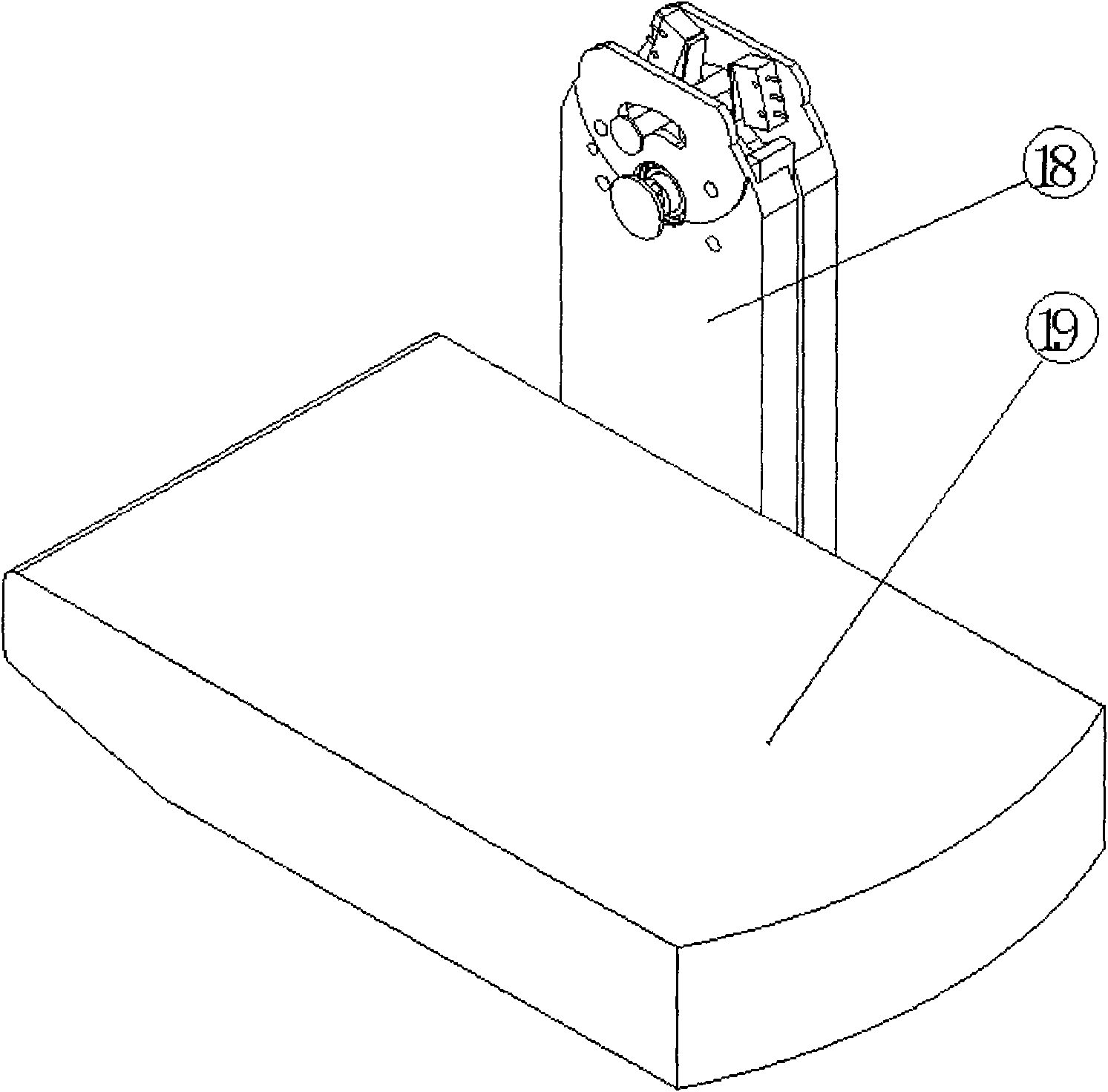
[0018] The controller receives the feedback signal from the encoder 12 to realize the closed-loop control of the speed and rotation angle of the motor 13, thereby limiting the movement of the ankle joint within a normal range. If the control circuit or the control program fails to execute, causing the motor to lose control or run away, when the ankle joint moves to the limit position, first the limit pin 1 touches the travel switch 2 to generate a signal to cut off the power circuit of the motor 13, if Stroke switch 2 also breaks down simultaneously, then is stuck in ankle joint inside and outside guard plate 18, 4 holes by limit pin 1 and enforces braking, to protect ankle joint from secondary damage.
[0019] Put the human foot in the shoe cover fixed on the pedal 19. When performing passive training, the mechanical device drives the foot to move. When moving upward, the sensor 7 is pressed to generate a measurement signal. When moving downward, the sensor 9 is pressed. Gene...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More