

Force servo-controlled power-driven manipulator
An electric manipulator and servo control technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as limited life, affecting operating performance, inconvenient operation, etc., to achieve accurate positioning and fast movement, reduce labor intensity, solve problems Inconvenient effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] The structural features of the force servo controlled electric manipulator of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
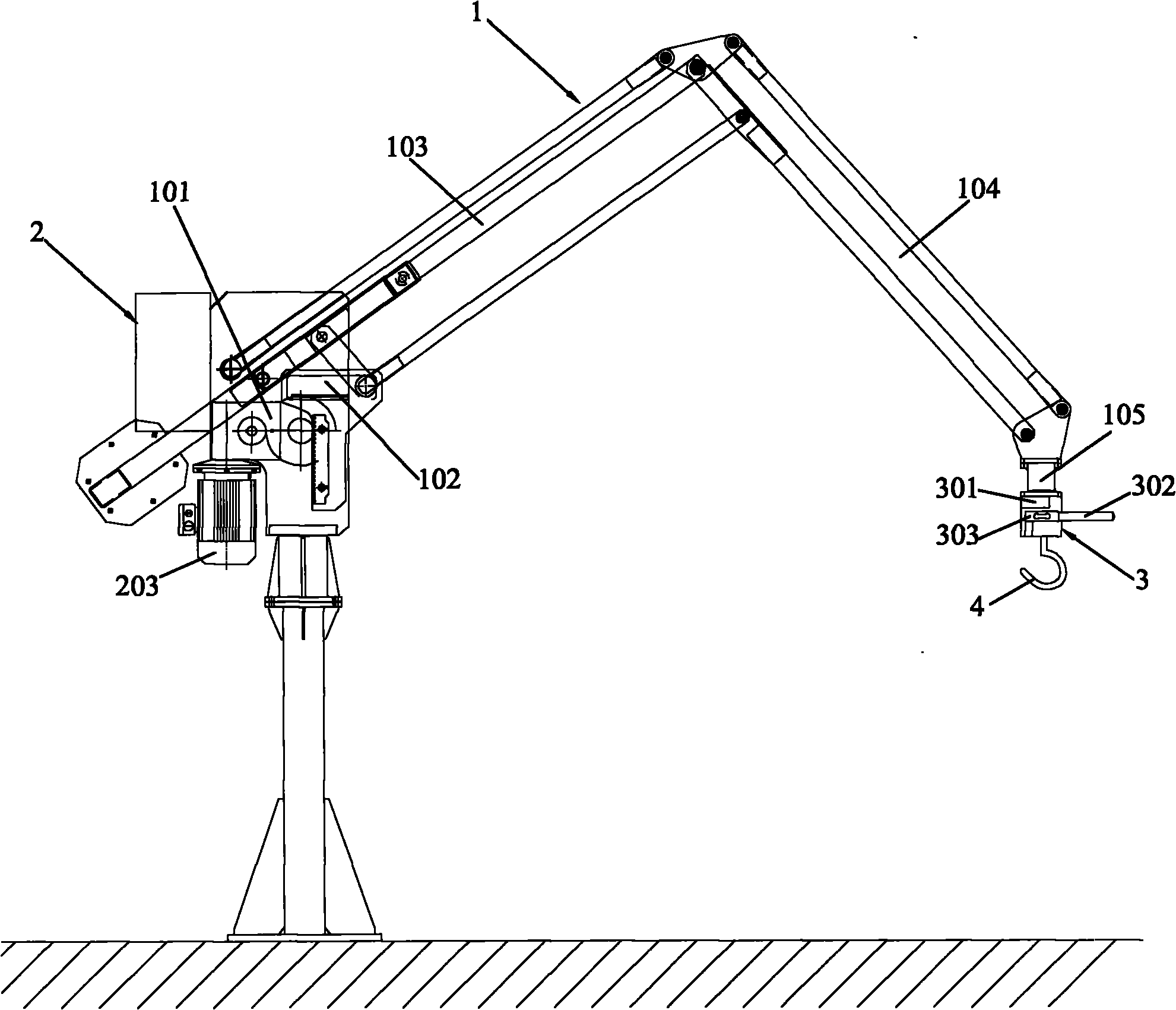
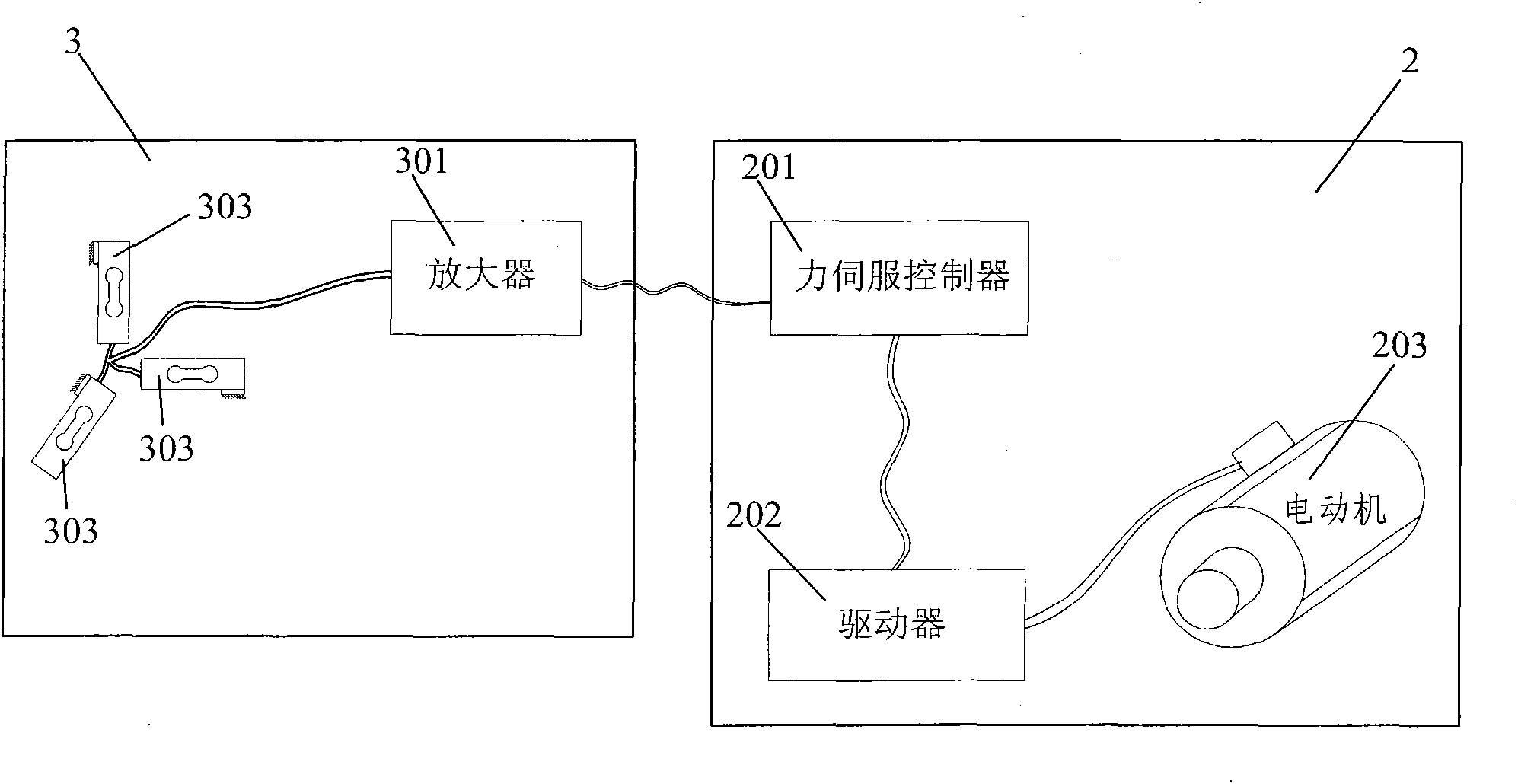
[0014] figure 1 It is a structural schematic diagram of an embodiment of an electric manipulator controlled by force servo in the present invention. Such as figure 1 As shown, the electric manipulator controlled by the force servo of the present invention includes a manipulator body 1 with a lifting hand 4, a control hand 3 and a force feedback control system 2 connected to the control hand 3 to control the manipulator body 1;
[0015] Such as figure 1 As shown, in this embodiment, the manipulator body 1 includes a transmission device 101, a body rotary joint 102 connected to the transmission device 101, a main arm 103 connected to the body rotary joint 102, and a forearm 104 connected to the main arm 103 , is connected to the hand swivel joint 105 on the top of the forearm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More