

Method for controlling feeding and discharging of mobile robot serving two numerically controlled machines
A mobile robot, CNC machine tool technology, applied in the direction of digital control, electrical program control, etc., can solve the problem of fixed reclaiming position, achieve accurate loading and unloading, improve work efficiency, and save labor.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
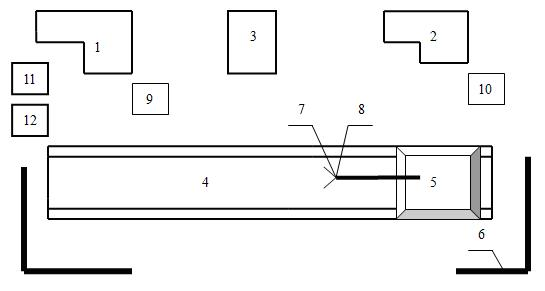
[0015] Such as figure 1 As shown in the site layout, two CNC machine tools are arranged on one side of the robot's walking axis, and the loading and unloading table is placed in the middle of the two CNC machine tools. The robot is installed on the walking axis, and the wireless 2D-CCD camera and the transmission time laser distance sensor are installed. On the end effector, a safety guardrail is set at both ends of the walking axis, and a vision support is installed near the three-jaw chucks of the two CNC machine tools. The embedded microprocessor adopts Samsung S3C2440 ARM9, the embedded operating system is Linux system, and the wireless 2D-CCD adopts the original American Linksys WVC210 Remote-controlled, and its wireless communication standard is 802.11b or 802.11g. Take, load and unload.
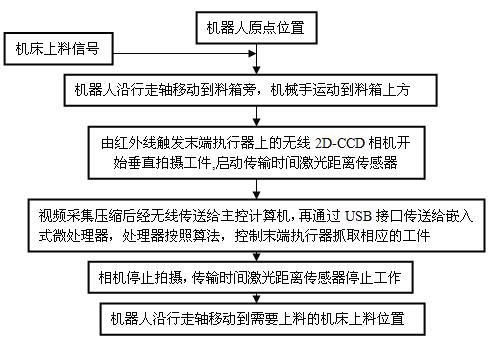
[0016] Grabbing of workpieces to be processed. CNC machine tool 1 (or 2) sends out a feeding signal, which is transmitted to the wireless receiver through the serial port communicat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More