

Six-foot robot with eccentric wheel legs
A hexapod robot and eccentric wheel technology, applied in the field of mobile robots, can solve the problems of bulky body, high cost, complicated control circuit, etc., and achieve the effects of good controllability, good stability and simplified transmission mechanism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
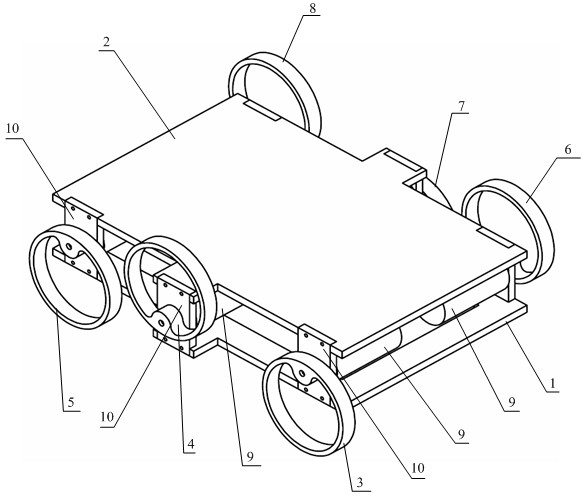
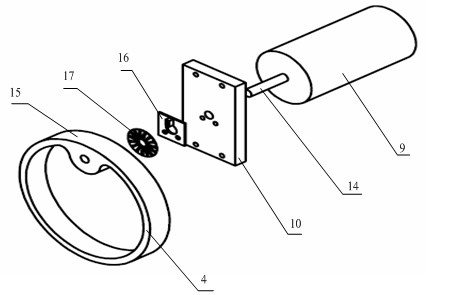
[0026] see figure 1 , figure 2 with image 3 , the hexapod robot with eccentric wheel legs proposed by the present invention includes a fuselage frame, an eccentric wheel 15, a motor 9, a power supply 19, a photoelectric encoder 21, a control circuit and a remote controller 28. Eccentric wheel 15 is walking leg, is installed in fuselage frame both sides; Motor, power supply 19, control circuit are all installed in fuselage frame inside; Remote controller 28 is separated from robot body and is held by robot operator.
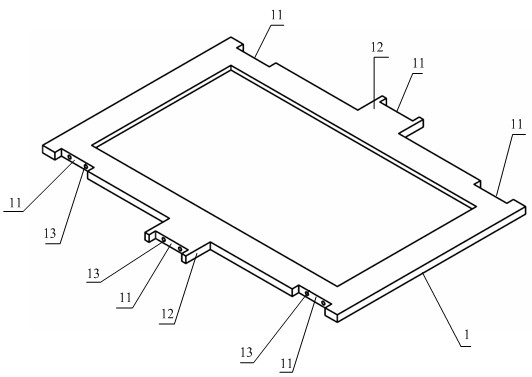
[0027] Wherein: the optimal structure of the fuselage frame is as follows: it is composed of a top plate 2, a bottom plate 1 and six connecting plates 10, and is flat and long as a whole, which not only reduces weight, but also has good stability. The structure of the top plate 2 and the bottom plate 1 are the same, they are both rectangular, with 6 grooves 11 evenly distributed on both sides, corresponding to the installation positions of the 6 eccentric whee...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Wheel width | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More