

Shape memory alloy spring-driven jumping robot
A memory alloy spring and robot technology, applied in the field of robots, can solve the problems of heavy structure, small power-to-weight ratio, and high driving voltage, and achieve the effects of simple structure, stable performance and improved bounce height.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
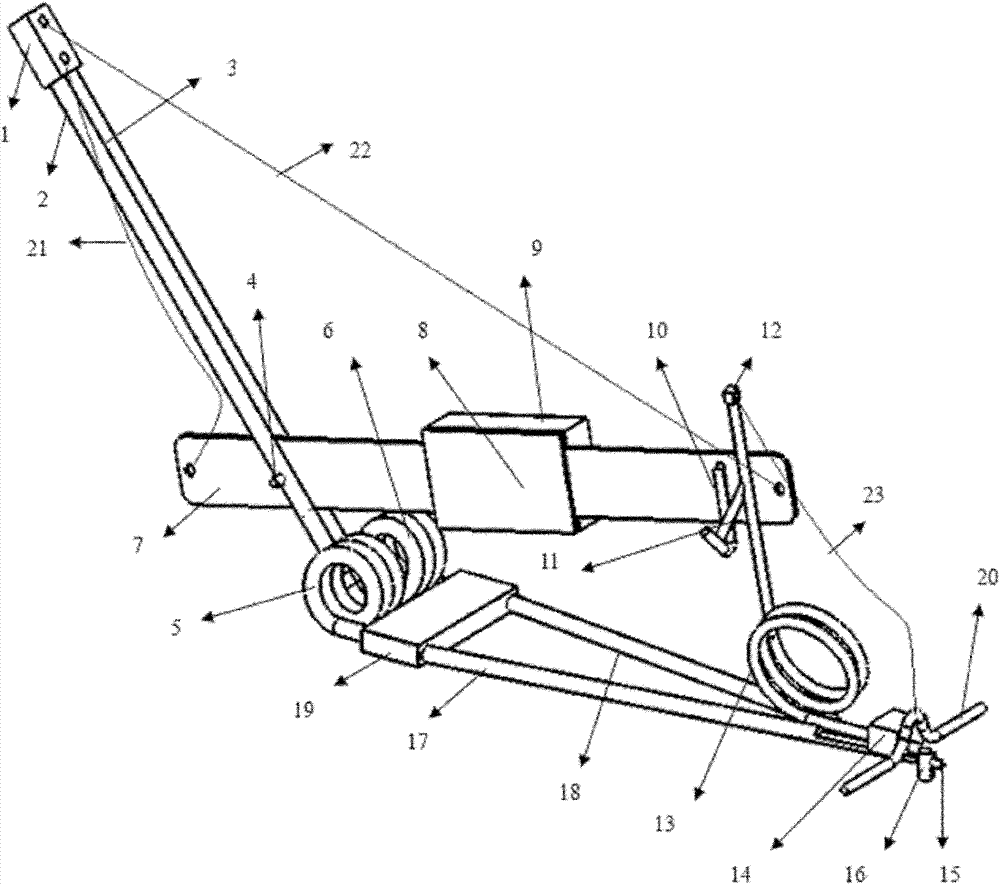
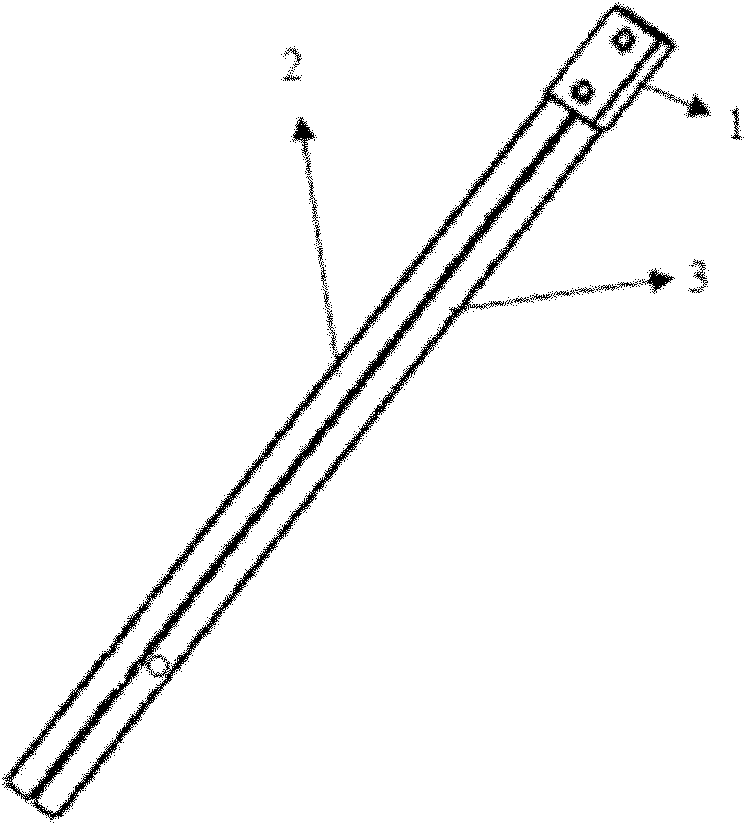
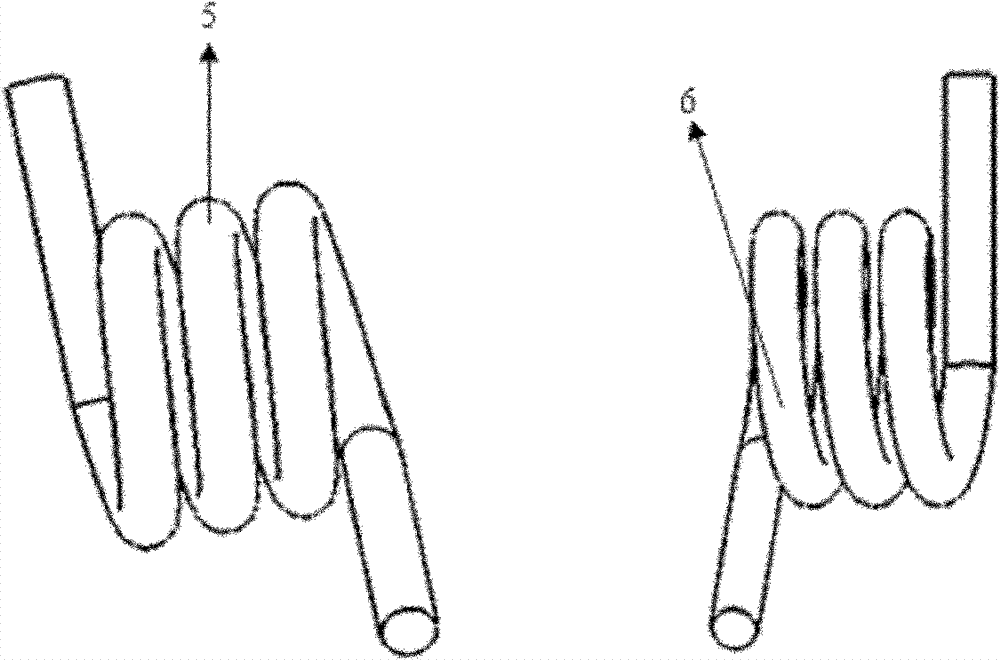
[0027] A bouncing robot driven by a shape memory alloy spring, comprising a forearm, an energy storage mechanism, an energy conversion mechanism, a rear arm, a trigger mechanism, a control system, a battery and an angle adjustment column; the forearm is composed of a first connecting block 1, a first rod 2 and The second rod 3 is fixedly connected, the first rod 2 and the second rod 3 are arranged in parallel and fixed on the first connecting block 1; the energy storage mechanism consists of a pair of first torsion springs arranged in parallel and symmetrically 5 and the second torsion spring 6, the front and rear extension ends of the two torsion springs are respectively inserted on the forearm and the rear arm; the energy conversion mechanism adopts a rotary lever type energy conversion mechanism, and the first memory alloy spring 21, the second The memory alloy spring 22, the third memory alloy spring 23, the rotary lever 7, the first hook 10 and the first bearing pin 4 are ...
Embodiment 2
[0029]A bouncing robot driven by a shape memory alloy spring, comprising a forearm, an energy storage mechanism, an energy conversion mechanism, a rear arm, a trigger mechanism, a control system, a battery and an angle adjustment column; the forearm is composed of a first connecting block 1, a first rod 2 and The second rod 3 is fixed, the first rod 2 and the second rod 3 are arranged in parallel and fixed on the first connecting block 1; the energy storage mechanism is composed of a pair of first torsion springs 5 arranged in parallel and symmetrical Formed with the second torsion spring 6, the front and rear extension ends of the two torsion springs are respectively inserted on the forearm and the rear arm; the energy conversion mechanism adopts a slider type energy conversion mechanism, and the slider 24, the third memory alloy spring 23 , the fourth memory alloy spring 26, the fifth memory alloy spring 27, the first two-way memory alloy spring 28 and the fifth rod 25, the...
Embodiment 3
[0031] A bouncing robot driven by a shape memory alloy spring, comprising a forearm, an energy storage mechanism, an energy conversion mechanism, a rear arm, a trigger mechanism, a control system, a battery and an angle adjustment column; the forearm is composed of a first connecting block 1, a first rod 2 and The second rod 3 is fixed, the first rod 2 and the second rod 3 are arranged in parallel and fixed on the first connecting block 1; the energy storage mechanism is composed of a pair of first torsion springs 5 arranged in parallel and symmetrical Formed with the second torsion spring 6, the front and rear extension ends of the two torsion springs are respectively inserted on the forearm and the rear arm; the energy conversion mechanism adopts a double spring type energy conversion mechanism, and the third memory alloy spring 23 and the second double The second two-way memory alloy spring 29 is connected between the first connection block 1 of the forearm and the second ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More