

Motion decoupling two-degree-of-freedom rotation parallel mechanism
A degree of freedom and parallel technology, applied in manipulators, program-controlled manipulators, mobile/orientation solar collectors, etc., can solve the problems of small working space and difficult control of parallel mechanisms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
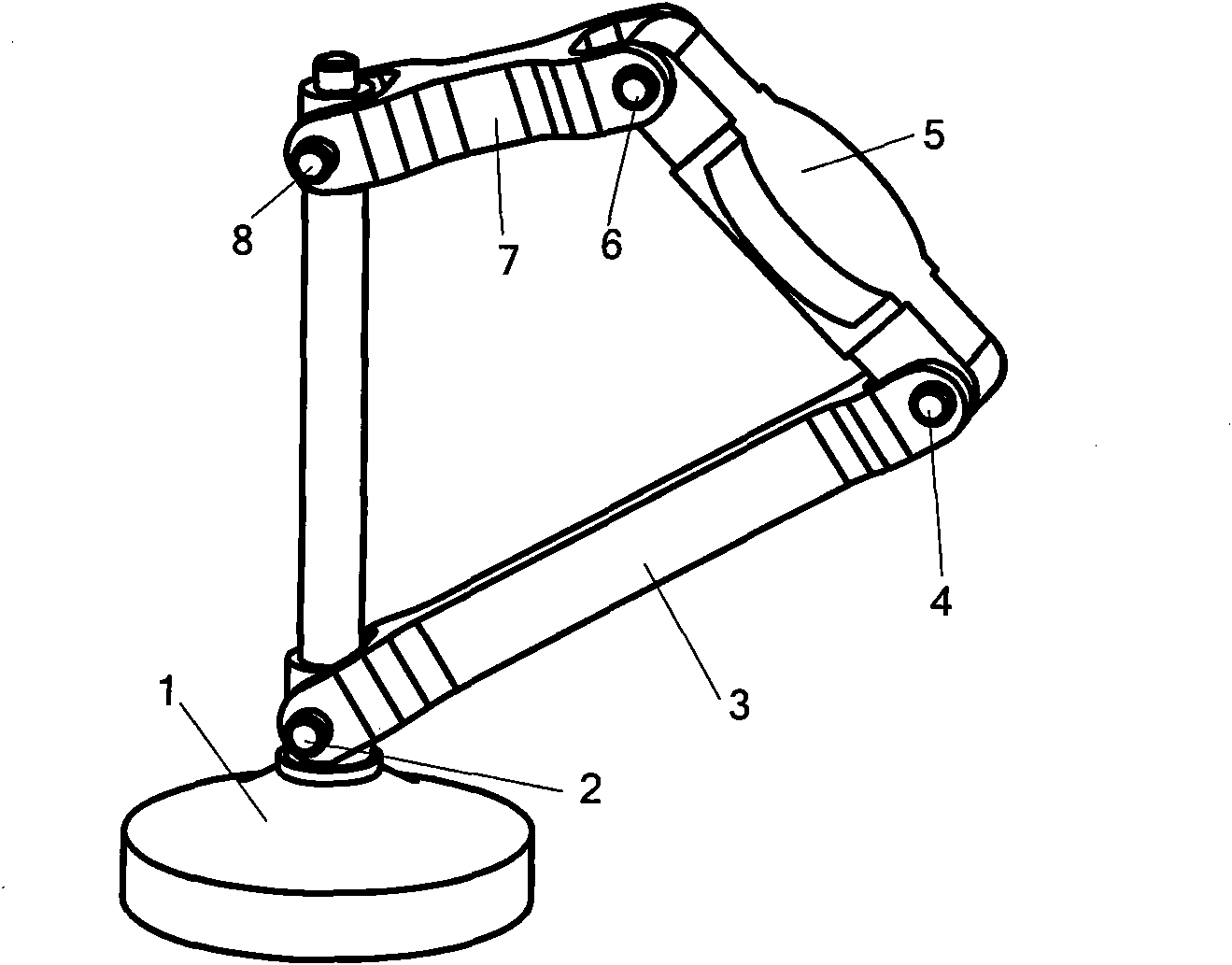
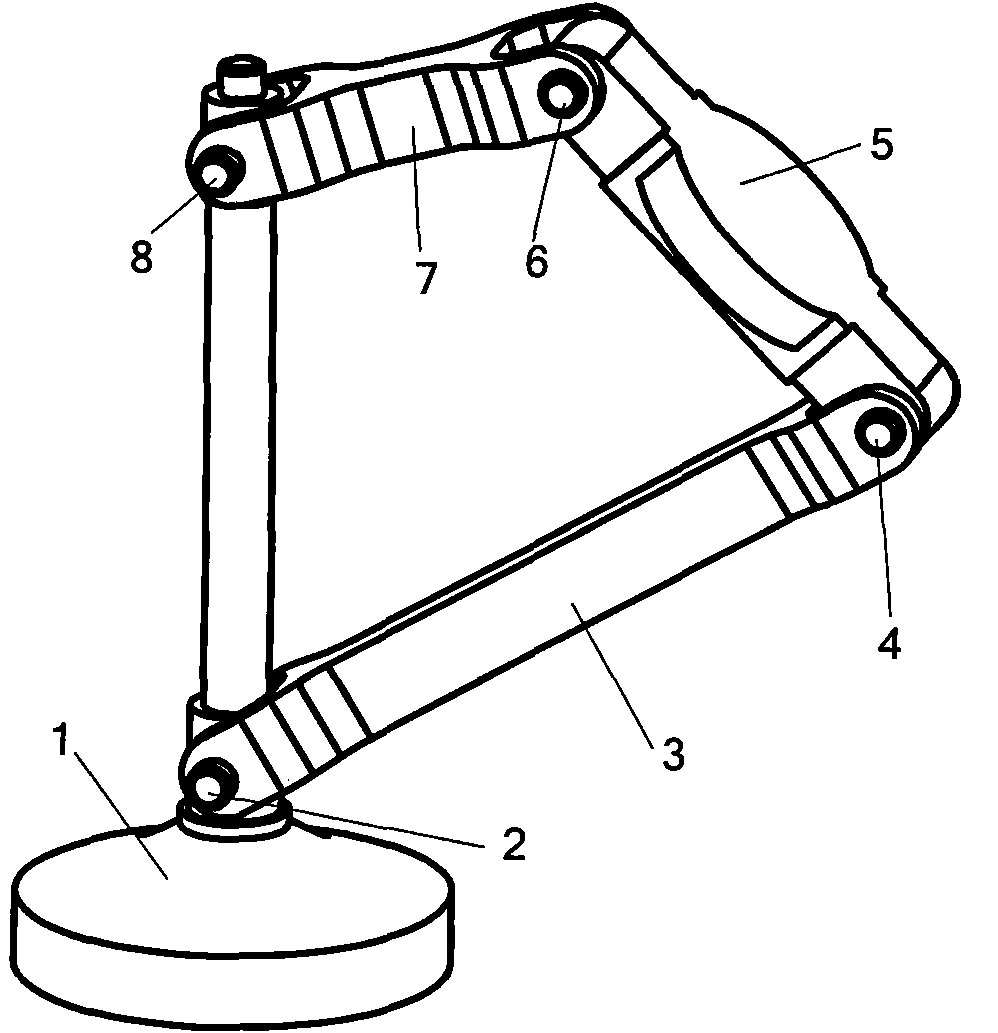
[0008] A two-degree-of-freedom rotational parallel mechanism with motion decoupling (see figure 1 ), consisting of fixed platform 1, moving platform 5 and two branches, wherein the first branch has two kinematic pairs of revolving joint and Hooke hinge, the kinematic pair connected with moving platform 5 is revolving joint 4, and fixed platform The kinematic pair connected with 1 is Hooke hinge 2; the second branch also has two kinematic pairs of revolving joint and Hooke hinge, the kinematic pair connected with moving platform 5 is revolving pair 6, and the kinematic pair connected with fixed platform 1 is Hooke hinge 8; one of the axes of the two Hooke hinges (2, 8) connected to the fixed platform 1 remains collinear, and the other axis remains parallel to the axes of the rotating pair 4 and the rotating pair 6 connected to the moving platform 5 .
[0009] The motion decoupling two-degree-of-freedom rotating parallel mechanism of the present invention has the characteristic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More