

Three-layer airborne flight control device for micro four-rotor aerial vehicle
A four-rotor aircraft, micro-miniature technology, applied in the direction of aircraft power plant, aircraft parts, transportation and packaging, etc., can solve catastrophic, GPS positioning failure, unsuitable for autonomous search, rescue, environmental detection and monitoring and other problems, achieve the effect of avoiding obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
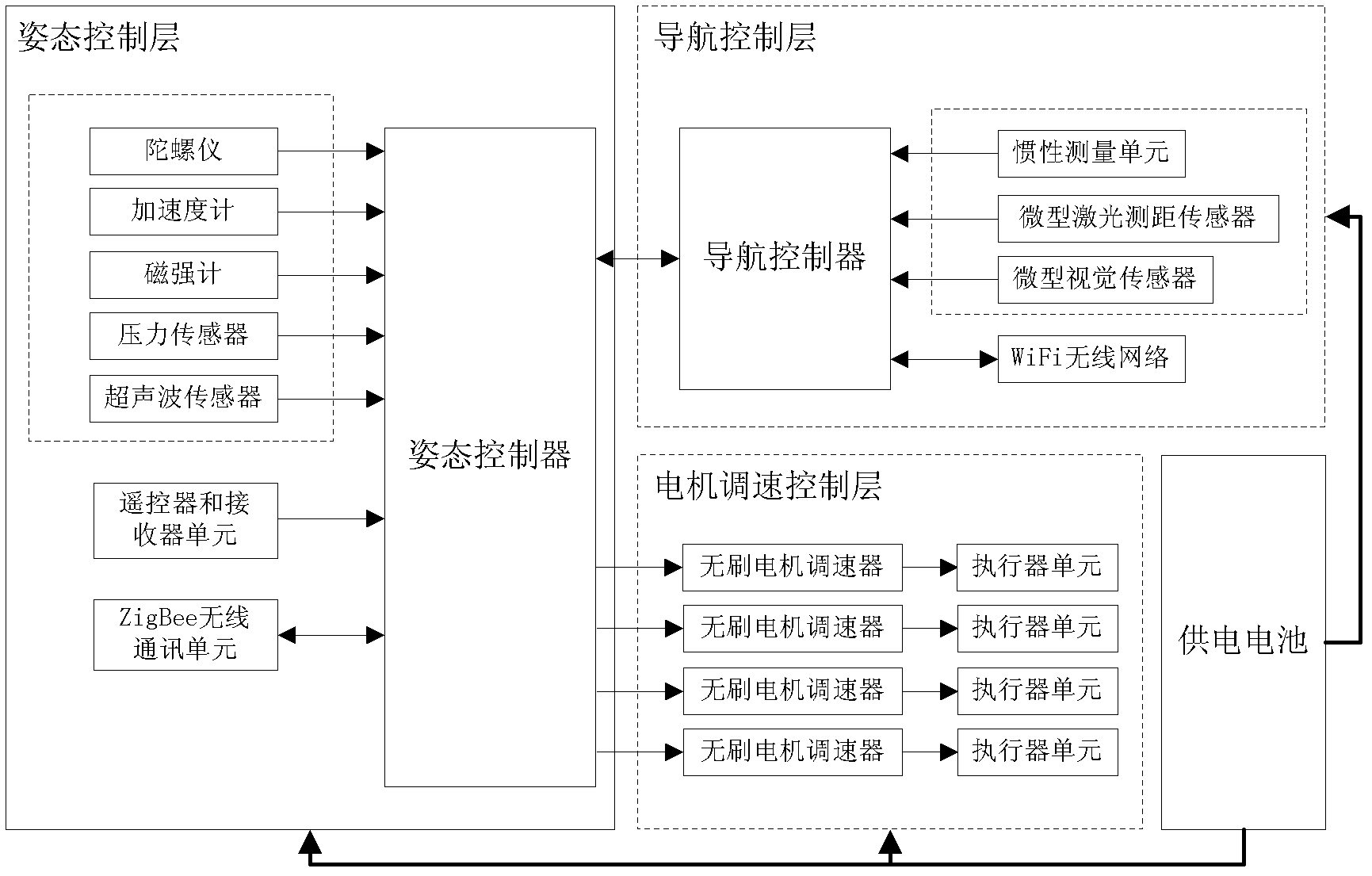
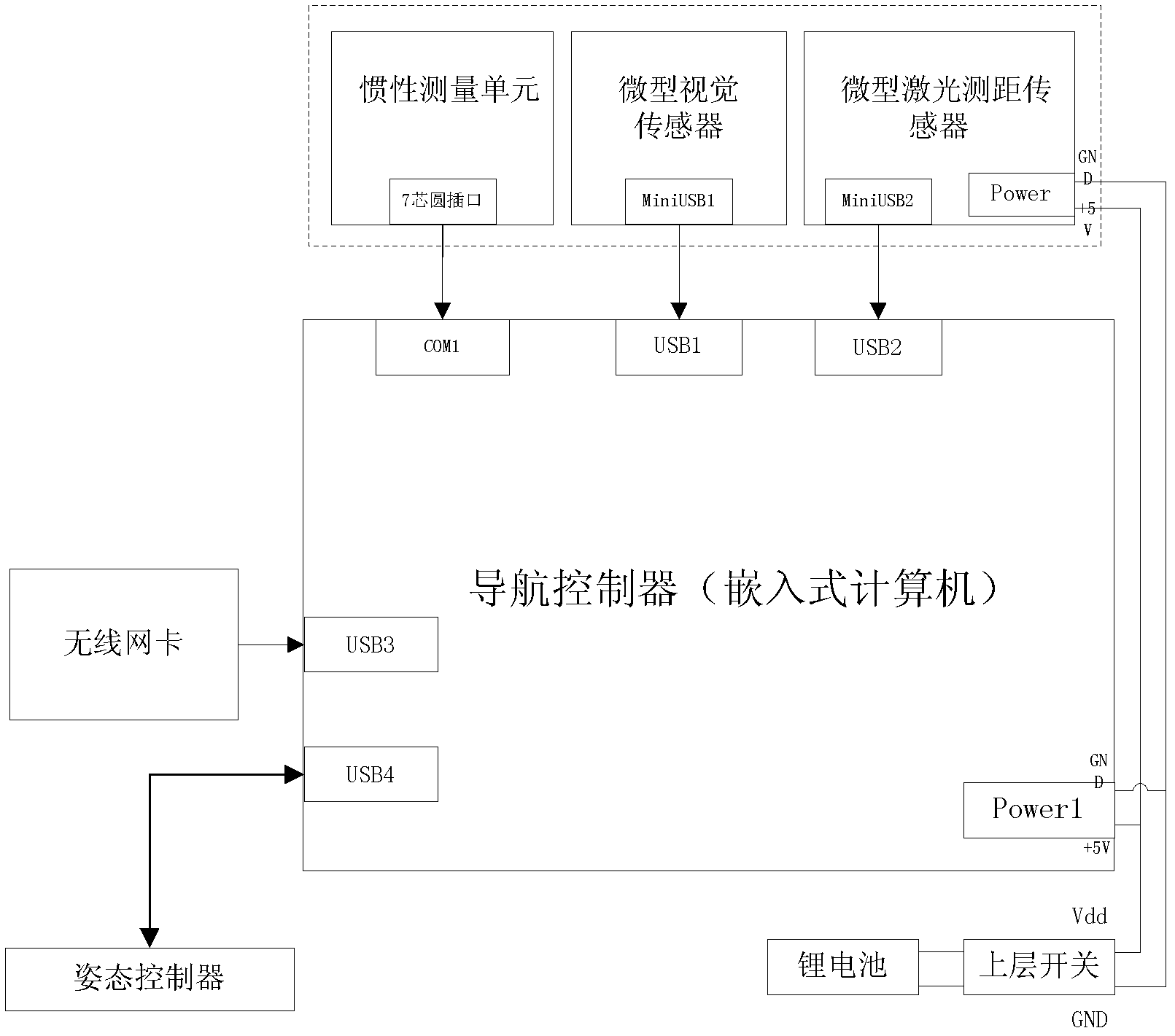
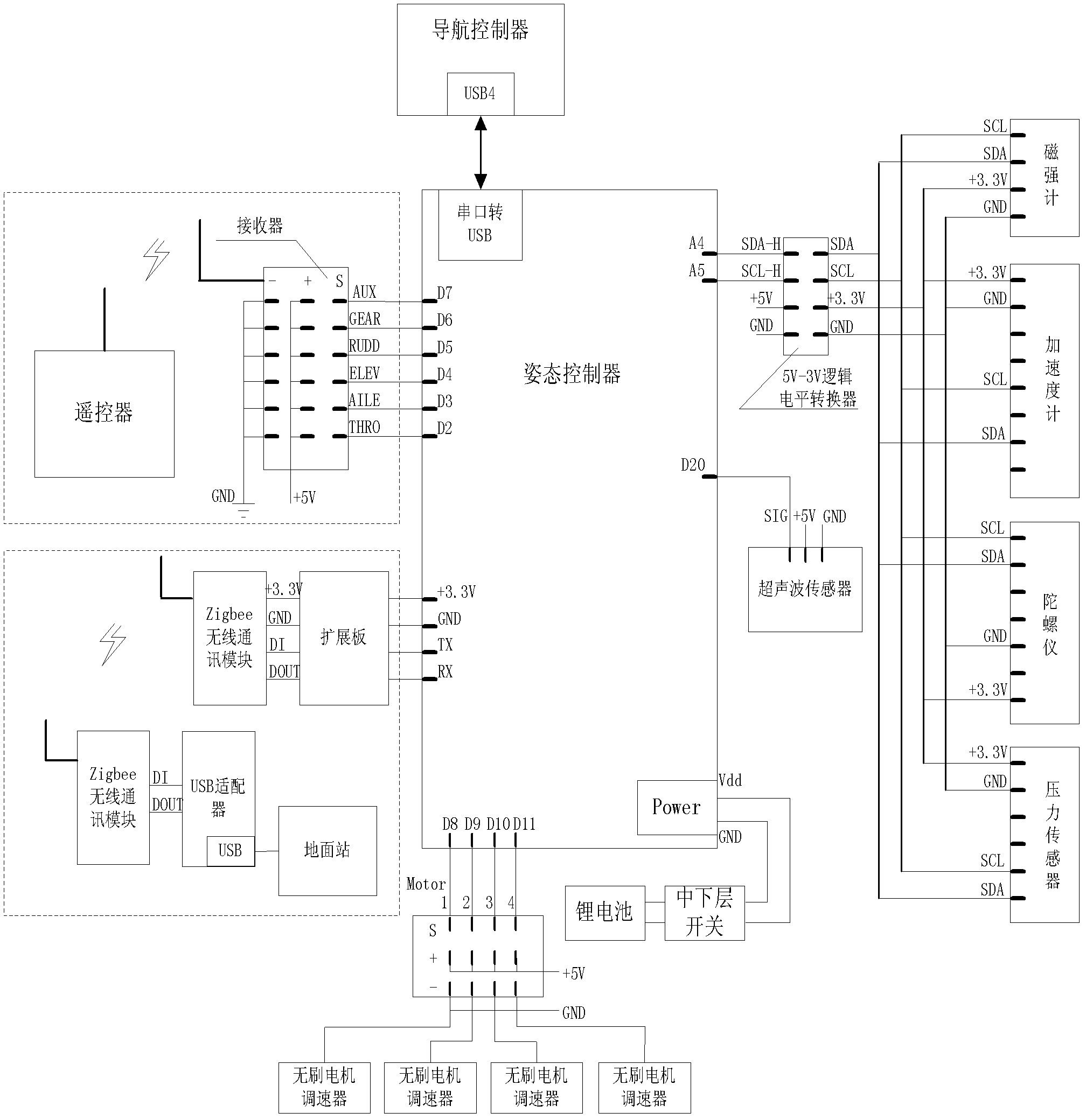
[0023] The overall structure of the three-layer airborne flight control device of the micro quadrotor aircraft is as follows: figure 1 As shown, in this embodiment, the model of the navigation controller is M-PMI2-1.5, the model of the inertial measurement unit is MTi_AHRS, the model of the miniature laser ranging sensor is URG-04LX, and the model of the miniature vision sensor is FFMU-03MTM / C. The model of the attitude controller is Arduino MEGA2560, the model of the gyroscope is ITG-3200, the model of the accelerometer is BMA180, the model of the magnetometer is HMC5843, the model of the pressure sensor is BMP085, and the model of the ultrasonic sensor is PING , the model of the remote controller is FT06-C, the model of the receiver is FRP06-P, the model of the expansion board of the wireless communication module is XBee Shield V1.0, the mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More