Flight control method for small unmanned aerial vehicle
An unmanned aerial vehicle and flight control technology, applied in the fields of guidance and control, and aviation aircraft navigation, can solve problems such as complex algorithms and many sensors, achieve strong anti-interference ability, simplify sensor configuration, and reduce costs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
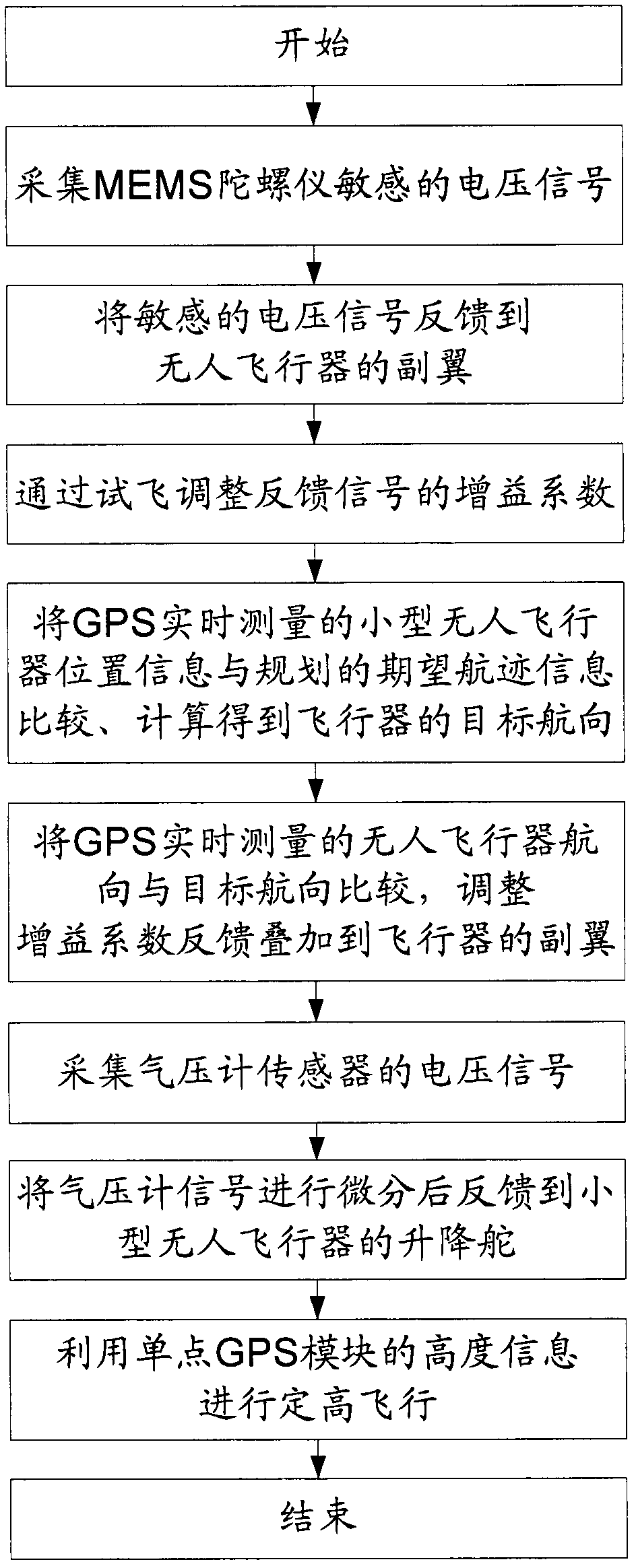
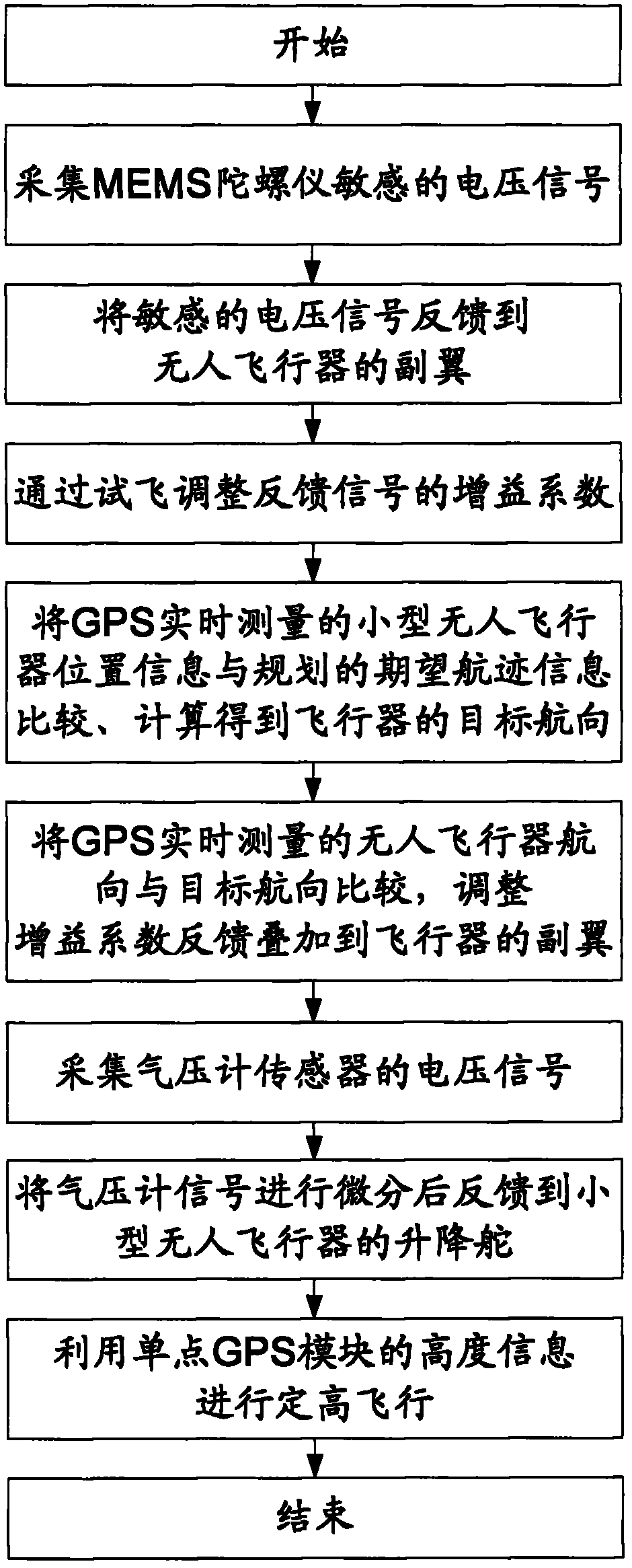
[0026] The invention uses a single-axis MEMS gyroscope, a barometer and a single-point GPS receiving module as sensing and measuring devices to realize autonomous flight control of a small unmanned aerial vehicle. The specific implementation is as follows:
[0027] (1) Install the single-axis MEMS gyroscope so that its sensitive axis forms an installation angle of 80-85 degrees with the body axis, and forms an installation angle of 5-10 degrees with the body's celestial axis, and collects the voltage signal of the single-axis MEMS gyroscope in real time , the signal is smoothed by low-pass filtering;
[0028] (2) Feedback the sensitive voltage signal of the single-axis MEMS gyroscope in step (1) to the aileron of the small UAV. In this step, the voltage value can be directly fed back to the aileron through an analog method, or the voltage signal can be collected through an A / D converter, and converted into angular velocity information, and then digitally driven to deflect the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More