

Locust bounce imitation robot driven by memory alloy
A technology of memory alloy spring and memory alloy, which is applied in the field of robots, can solve the problems of complex structure, small power and large mass of driving and triggering devices, and achieve simple structure, simple and light driving and triggering mechanism, and simple structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
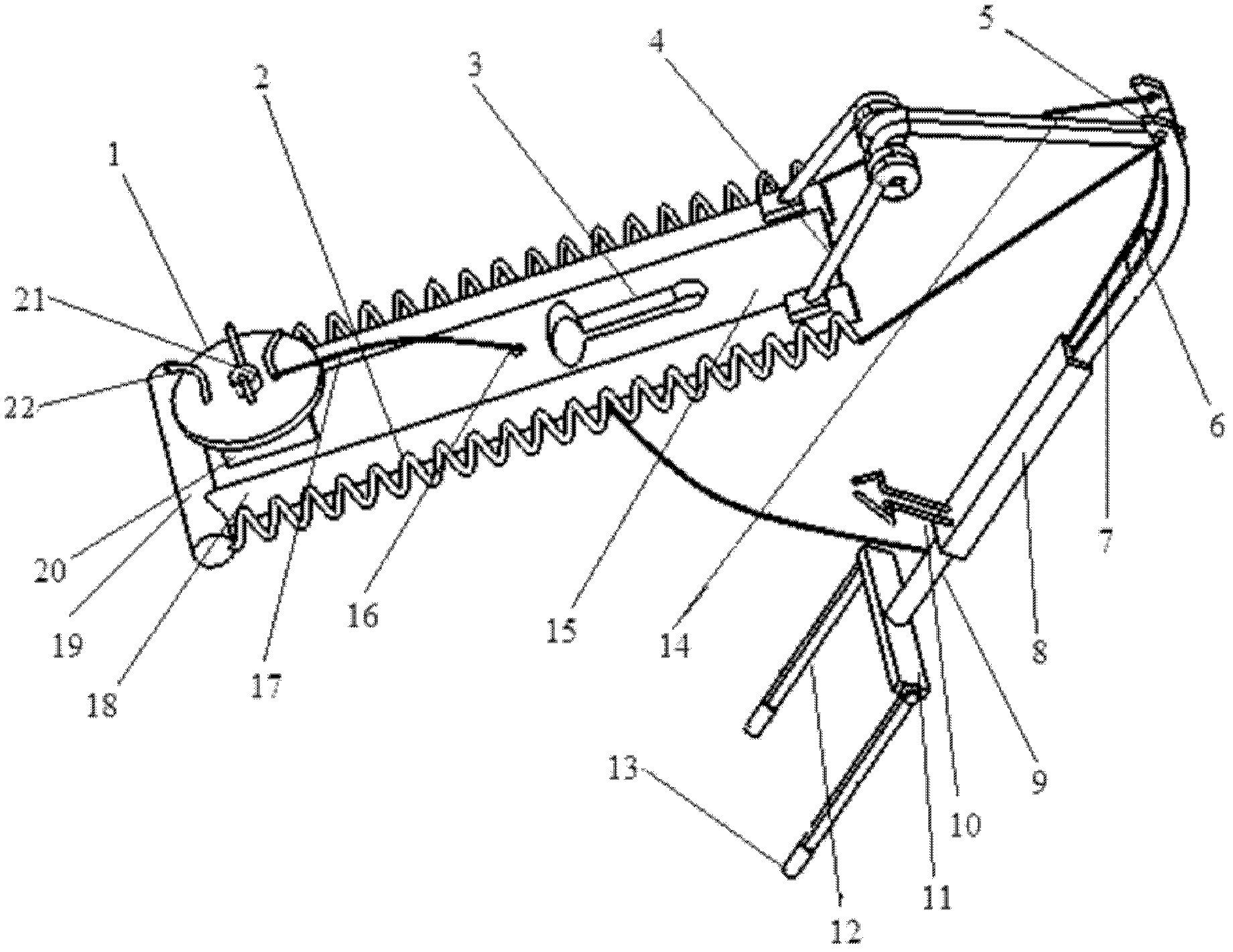
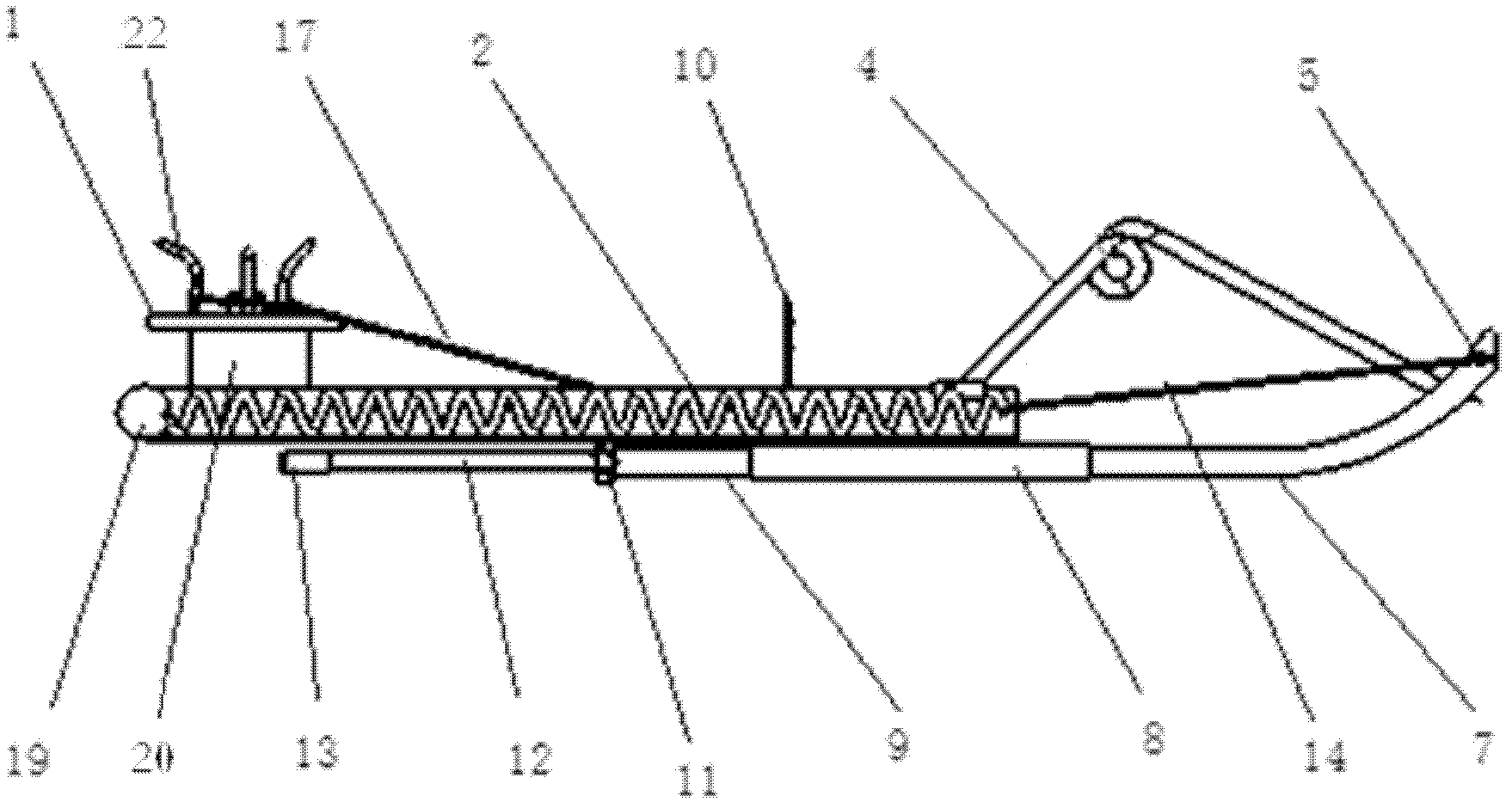
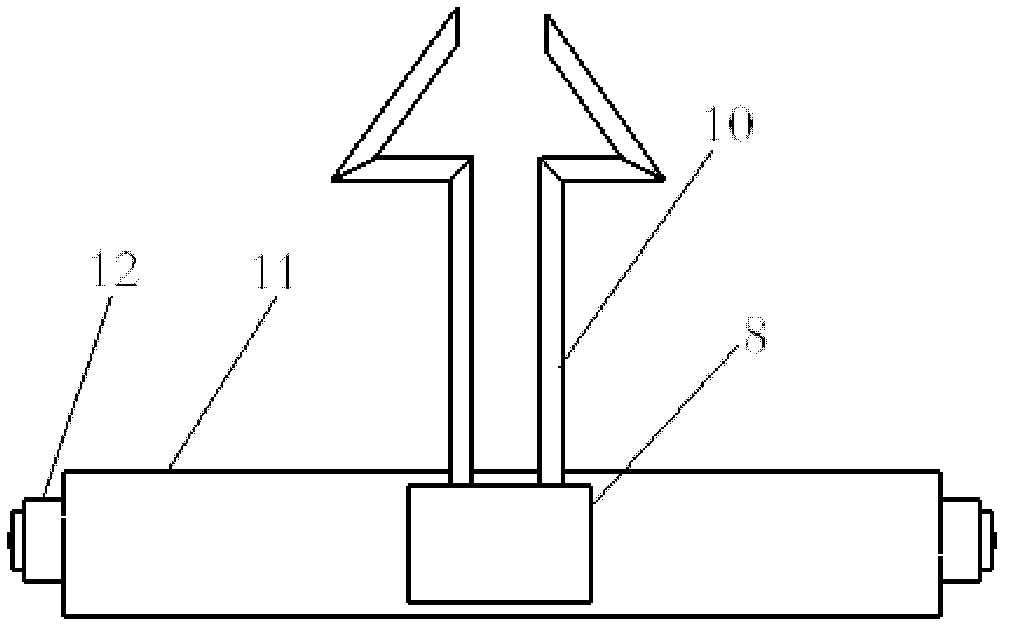
[0018] The imitation locust bouncing robot driven by memory alloy of the present invention includes a thigh structure, a shank structure, a memory alloy spring 2, an energy storage torsion spring 4 and a reset structure, and the thigh structure is composed of a support plate and side support rods fixed on both sides of the support plate 18 and the bottom support rod 19 at the end. The support rods 18 on both sides are arranged in equal length and parallel. The calf structure includes a calf board 7, a calf upper segment 8, a calf middle segment 9 and a calf lower segment 12. The two calf boards 7 are fixedly connected. At the upper end of the upper section 8 of the calf, the lower end of the upper section 8 of the rod type is fixedly connected with the upper end of the middle section 9 of the calf, the lower end of the middle section 9 of the calf fixes ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More