

Tubular holder for holding tail end of mechanical arm of holding bone drill
A technology of mechanical arms and grippers, applied in the field of gripping mechanisms, can solve the problems of grippers that do not have positioning accuracy, assembly and disassembly, and gripping reliability, so as to reduce the probability of interference, simple operation, and fewer parts Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
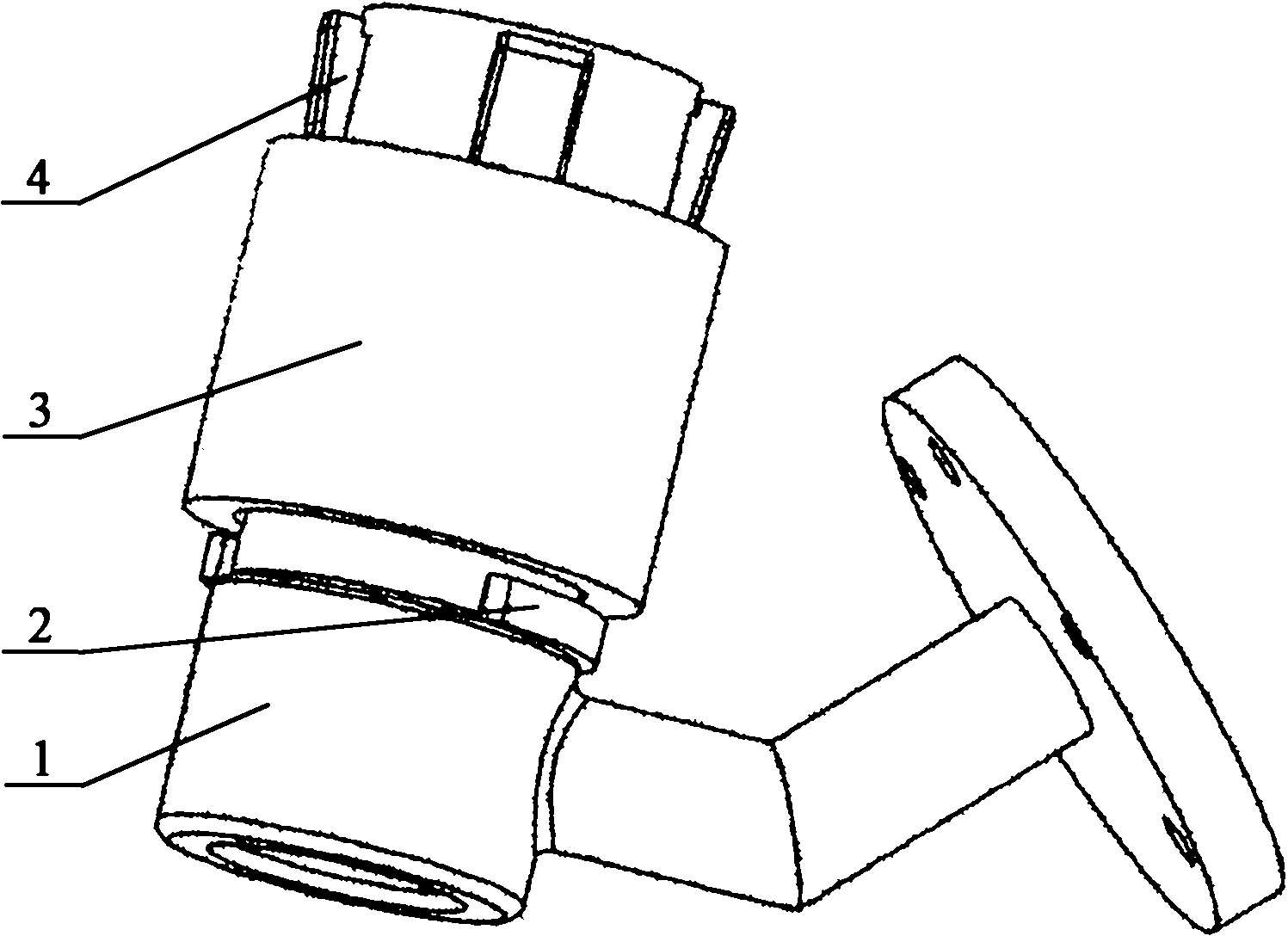
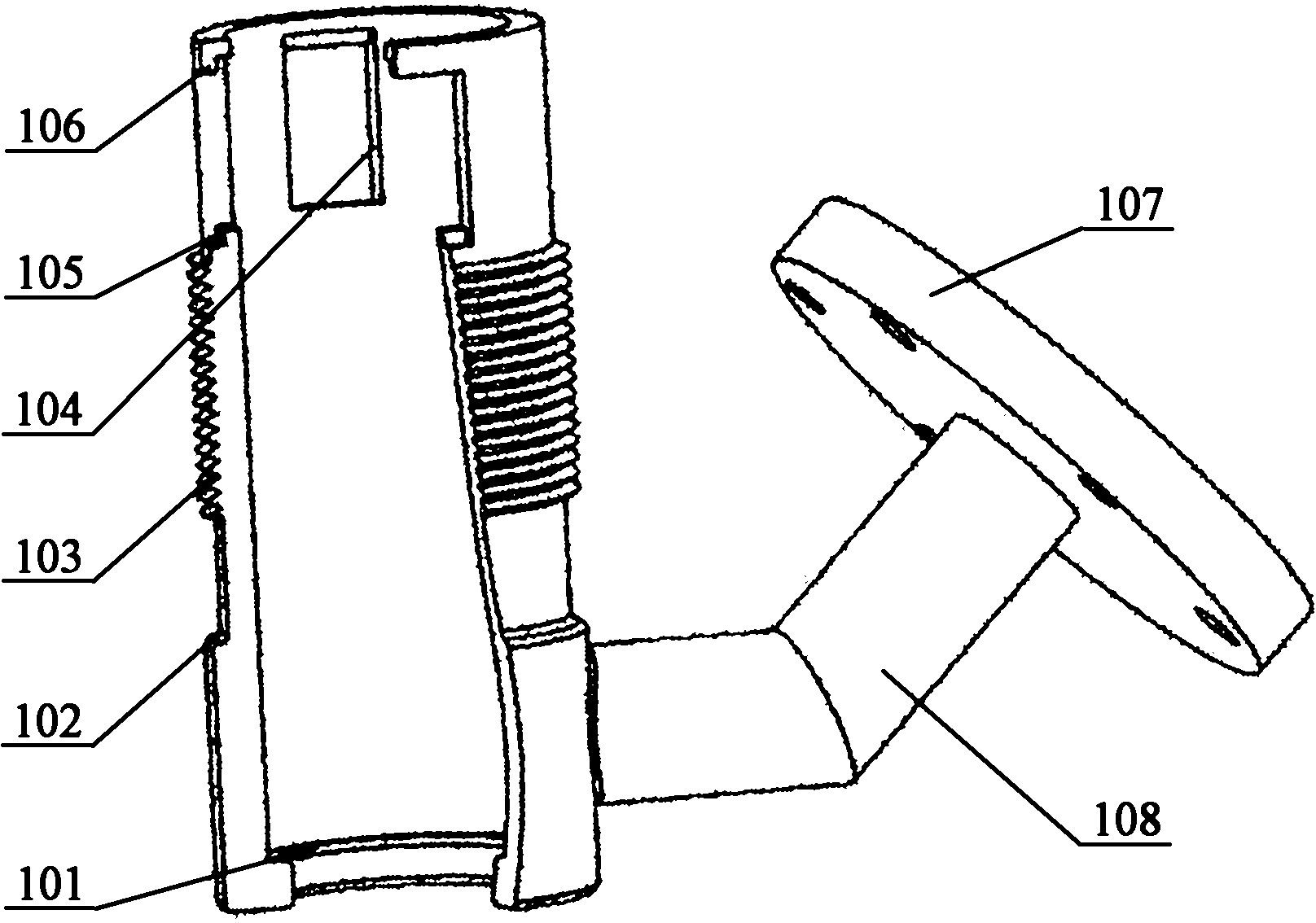
[0026] The tubular holder at the end of the mechanical arm holding the bone drill of the present invention should meet the following functional requirements: (1) As a medical device, the bone drill should be cleaned and disinfected frequently, so the holder must realize the installation and disassembly of the bone drill in a simple manner , to facilitate the operation of medical staff; (2) As a part of the robot system, the holder must have high positioning accuracy to ensure that the position and angle of the bone drill are always consistent after each disassembly; (3) The holder must have a small external dimension and a simple external shape to minimize the probability of its interference with other medical equipment and the patient's body, and at the same time be easy to clean; (4) In addition, the holder must be compatible with manual hand...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More