

Three-dimensional translation and one-dimensional circumferential rotation type parallel welding robot
A technology of welding robot and three-dimensional translation, applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve the problems of joint error accumulation, large inertia, poor rigidity, etc., achieve small inertia, convenient control, reduce The effect of body weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
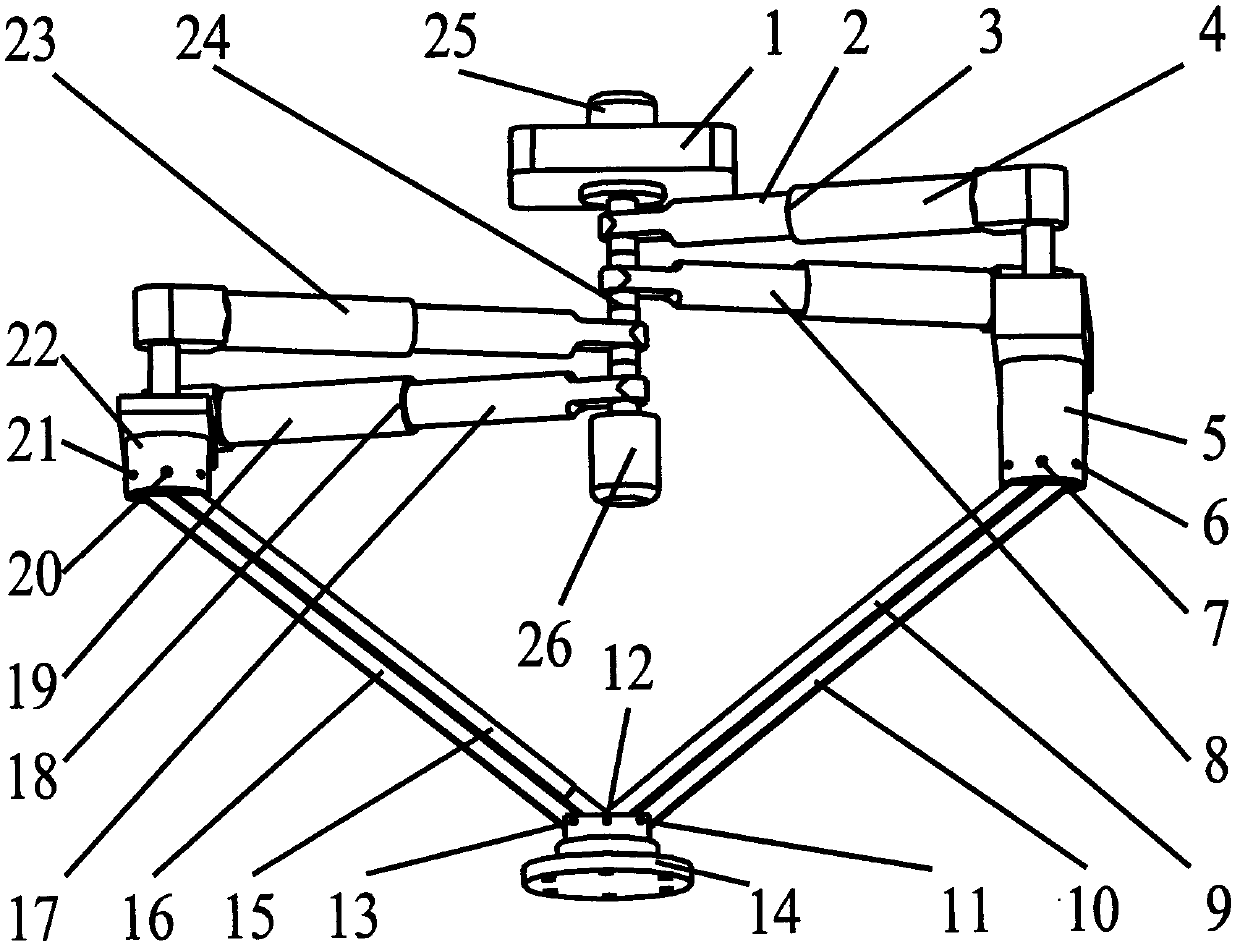
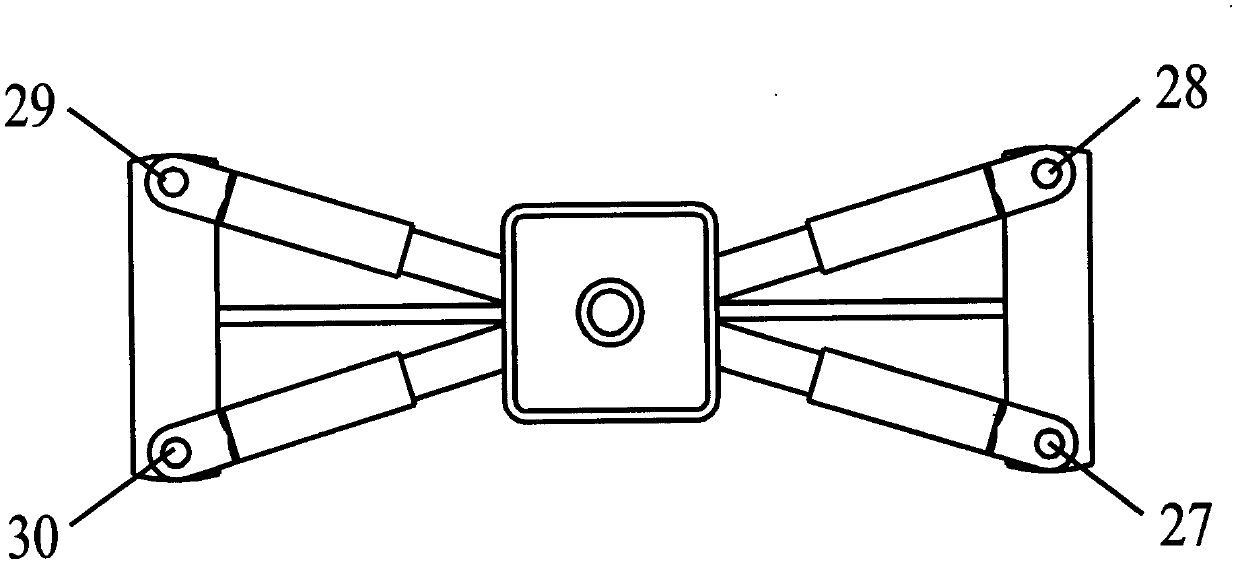
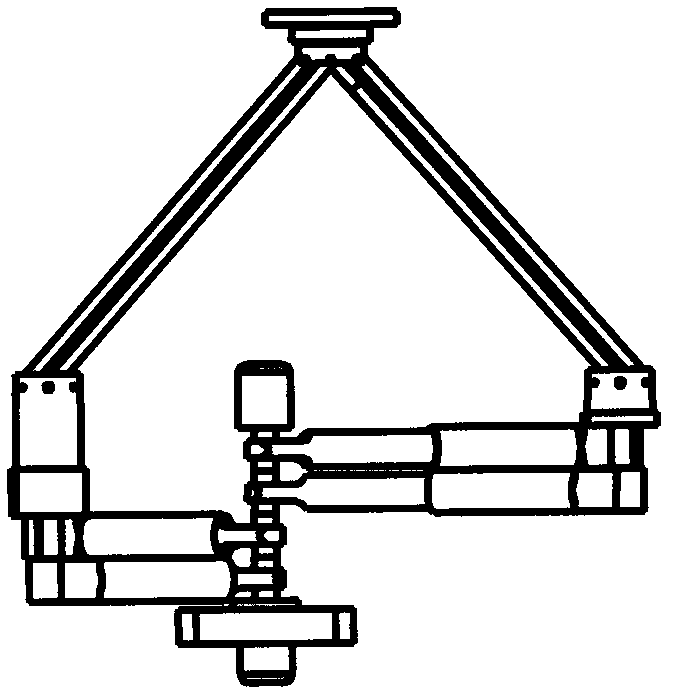
[0020] control figure 1 and figure 2 , a parallel welding robot with three-dimensional translation and one-dimensional full circle rotation, including a first RPRR closed-loop sub-chain, a second RPRR closed-loop sub-chain and an actuator sub-chain.
[0021] The first RPRR closed-loop sub-chain is formed by connecting the first active rod 2, the first connecting rod 4, the first turntable 5, and the first linear drive 8, and the first active rod 2 is connected to the machine through the first rotating pair 23. On the frame 1, the first active rod 2 is driven by the first servo motor 25, the other end of the first active rod 2 is connected with the first connecting rod 4 through the first moving pair 3, and the other end of the first connecting rod 4 is connected through the second rotating pair 27 is connected with the firs...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More