

Center-of-gravity regulating device applied to underwater robotic dolphin
A technology for adjusting the center of gravity and underwater machines, which is applied to underwater operation equipment, transportation and packaging, ships, etc. It can solve the problems of limited bearing capacity and weight limitation of the pendulum, and achieve simple production, convenient control, and small radial load Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
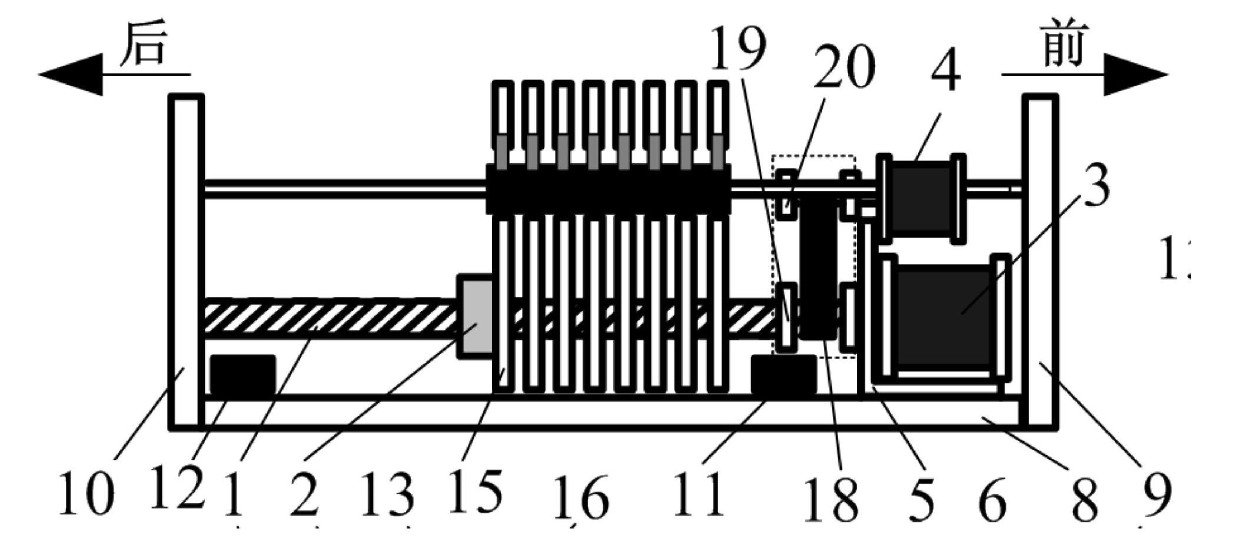
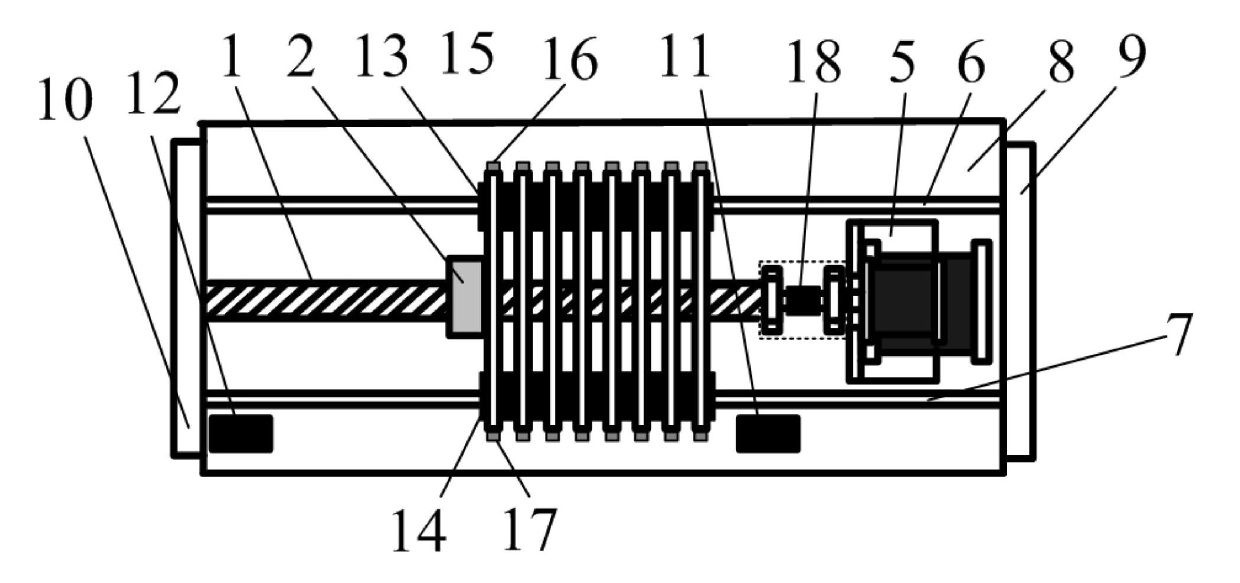
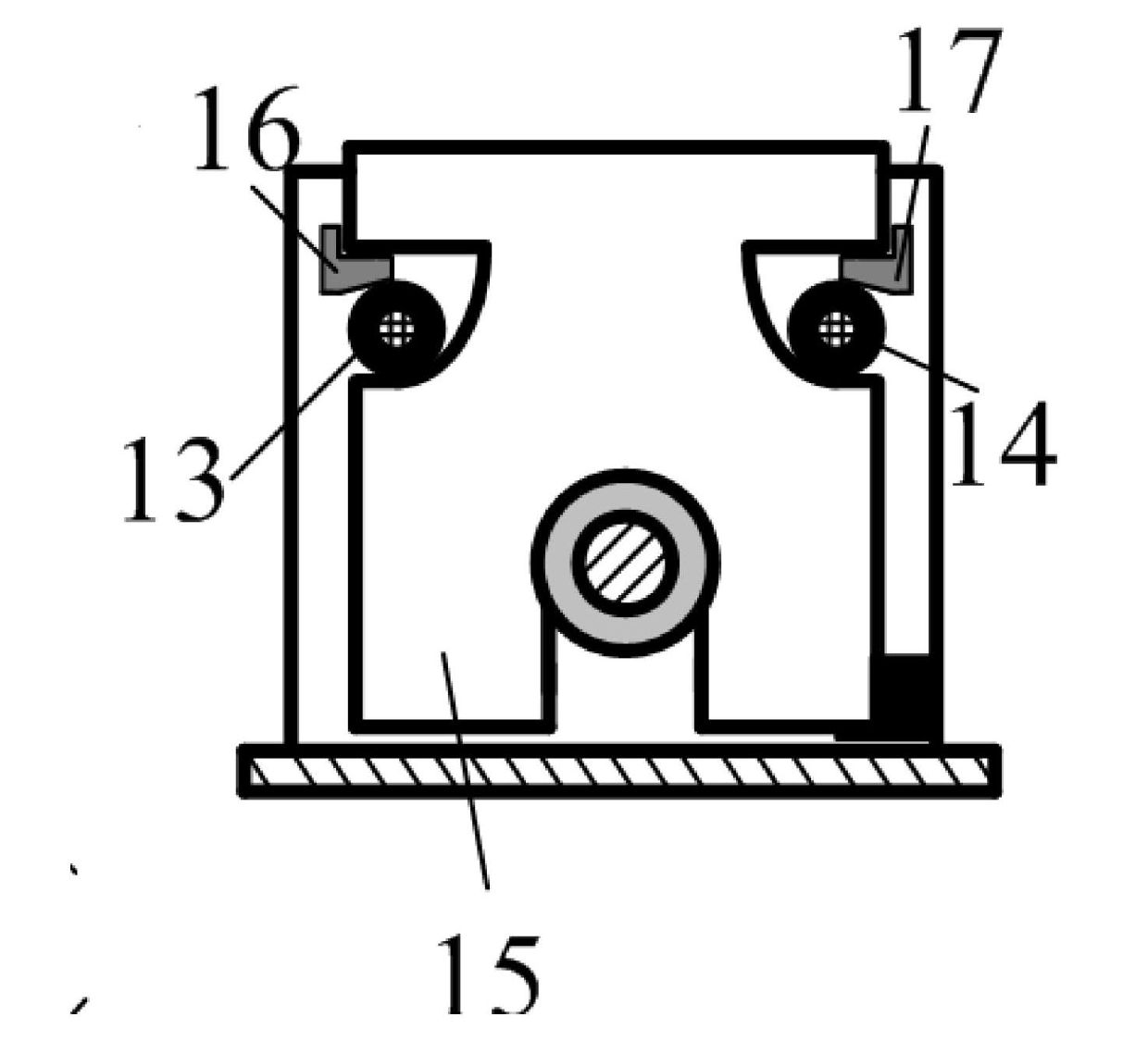
[0013] See attached figure 1 , 2 , 3, a center of gravity adjustment device applied to underwater machine dolphins, which includes: lead screw 1, lead screw nut 2, slider group, stepper motor 3, encoder 4, encoder transmission kit, L-shaped fixed frame 5. Left bearing rod 6, right bearing rod 7, bottom plate 8, front vertical plate 9, rear vertical plate 10, front limit switch 11 and rear limit switch 12;
[0014] Wherein the slider group includes: left linear bearing 13, right linear bearing 14, copper block 15, left fixed wedge 16 and right fixed wedge 17;
[0015] The front and rear ends of the left bearing rod 6 and the right bearing rod 7 are respectively fixed on the front vertical plate 9 and the rear vertical plate 10, and the front vertical plate 9 and the rear vertical plate 10 are fixed on the front and rear ends of the straight base plate 8; The motor 3 and the encoder 4 are fixed on the base plate 8 through the L-shaped fixing frame 5, and the stepper motor 3 is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More