

Satellite gyroscope group fault detection, separation and estimation method based on equivalence relation and wavelet transform numerical differentiation
A technology of wavelet transform and numerical differentiation, applied in measuring devices, instruments, etc., can solve problems such as failure to provide fault amplitude information, achieve the effect of reducing the amount of calculation, reducing the amount of calculation, and suppressing the influence of measurement noise
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0029] Specific Embodiment 1: This embodiment is to use the method based on the equivalence relationship and the numerical differentiation based on wavelet transform to detect the satellite gyroscope group fault in real time and separate and estimate the fault after judging that the fault occurs. This embodiment is based on the satellite gyroscope During the operation of the group, the hardware redundancy of the inertial gyro components of the moving body is used, and the equivalence relation method is used to detect whether the inertial gyro components fail in real time.
[0030] There are many configurations of the satellite gyroscope group, all of which can be implemented by the method provided by the present invention, but different configurations use their unique measurement equations. In the satellite system, the gyro components usually adopt the configuration of three orthogonal one oblique (3+1S) inertial gyroscope components. This embodiment illustrates the effectivene...
specific Embodiment approach 2
[0046] Specific embodiment two: the difference between this embodiment and specific embodiment one is that the satellite inertial gyro group is set to When , the amplitude of the X-axis gyro sensor is Take the constant drift mutation fault as an example. Such as figure 1 As shown, the specific execution steps are as follows:
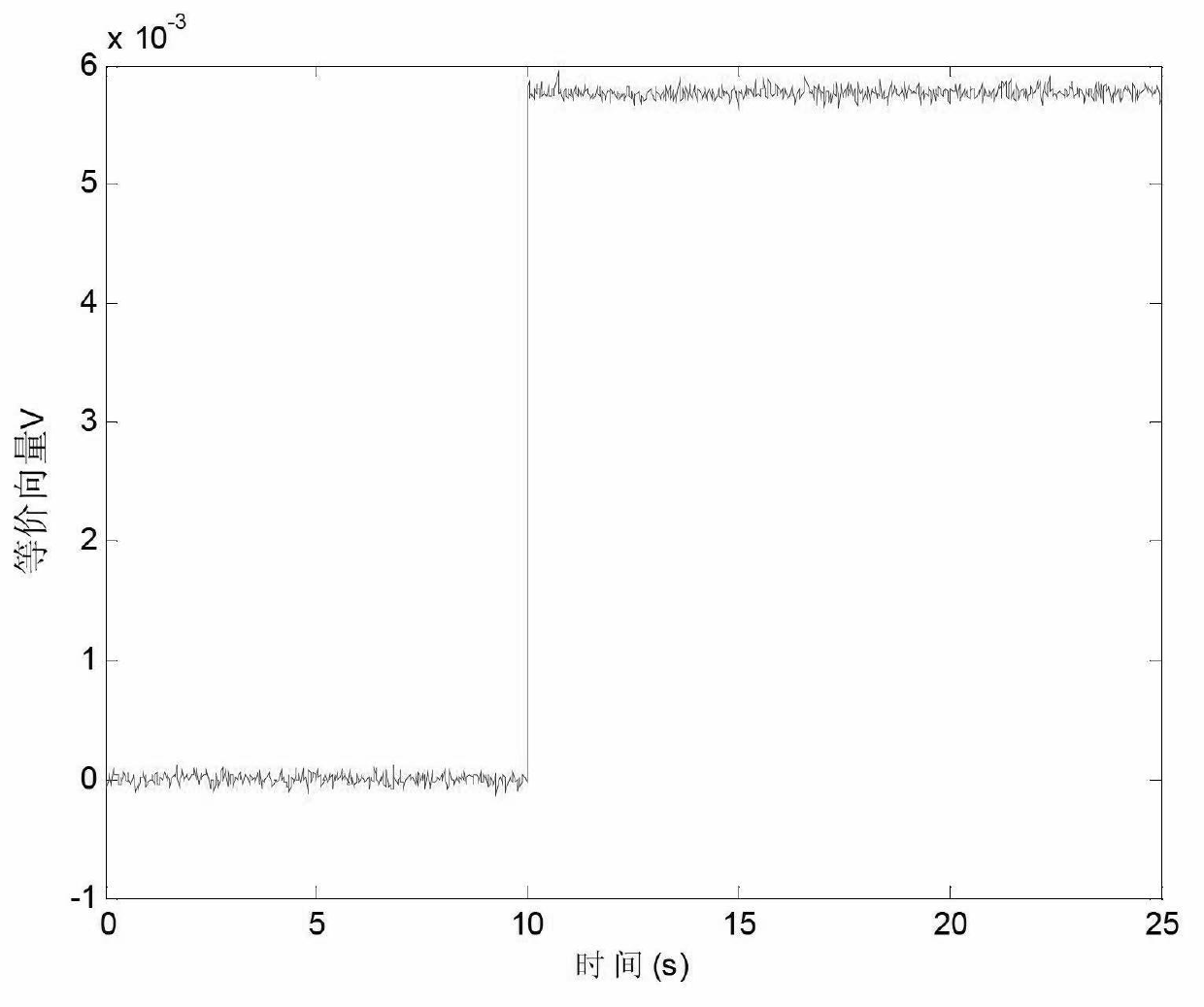
[0047] Execution step 1: judge whether a fault occurs according to the method described in the first embodiment, the equivalent vector The norm result of image 3 shown. If the magnitude of the equivalent vector exceeds the predetermined detection threshold, it indicates that the gyro group is faulty, and step 2 is performed.
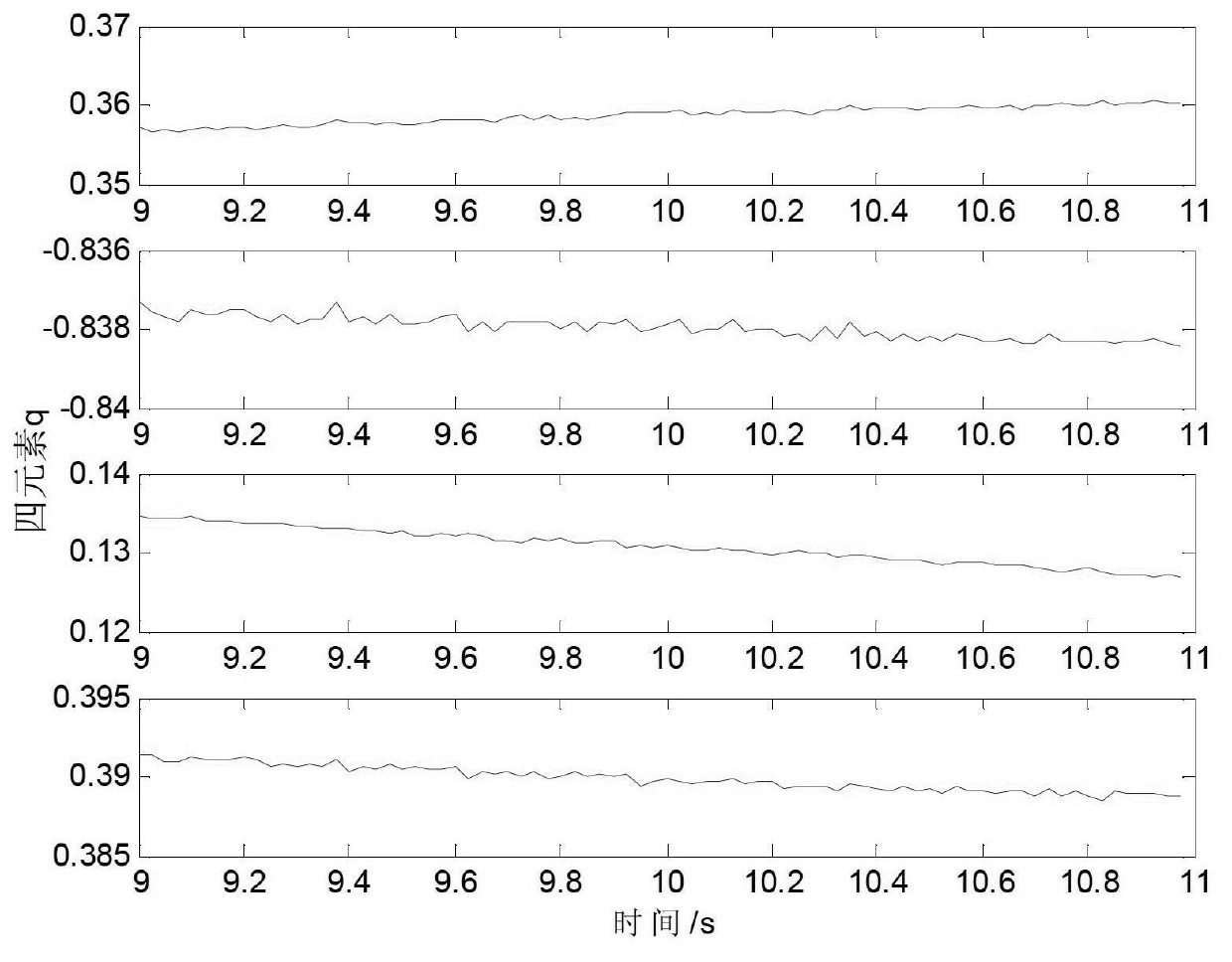
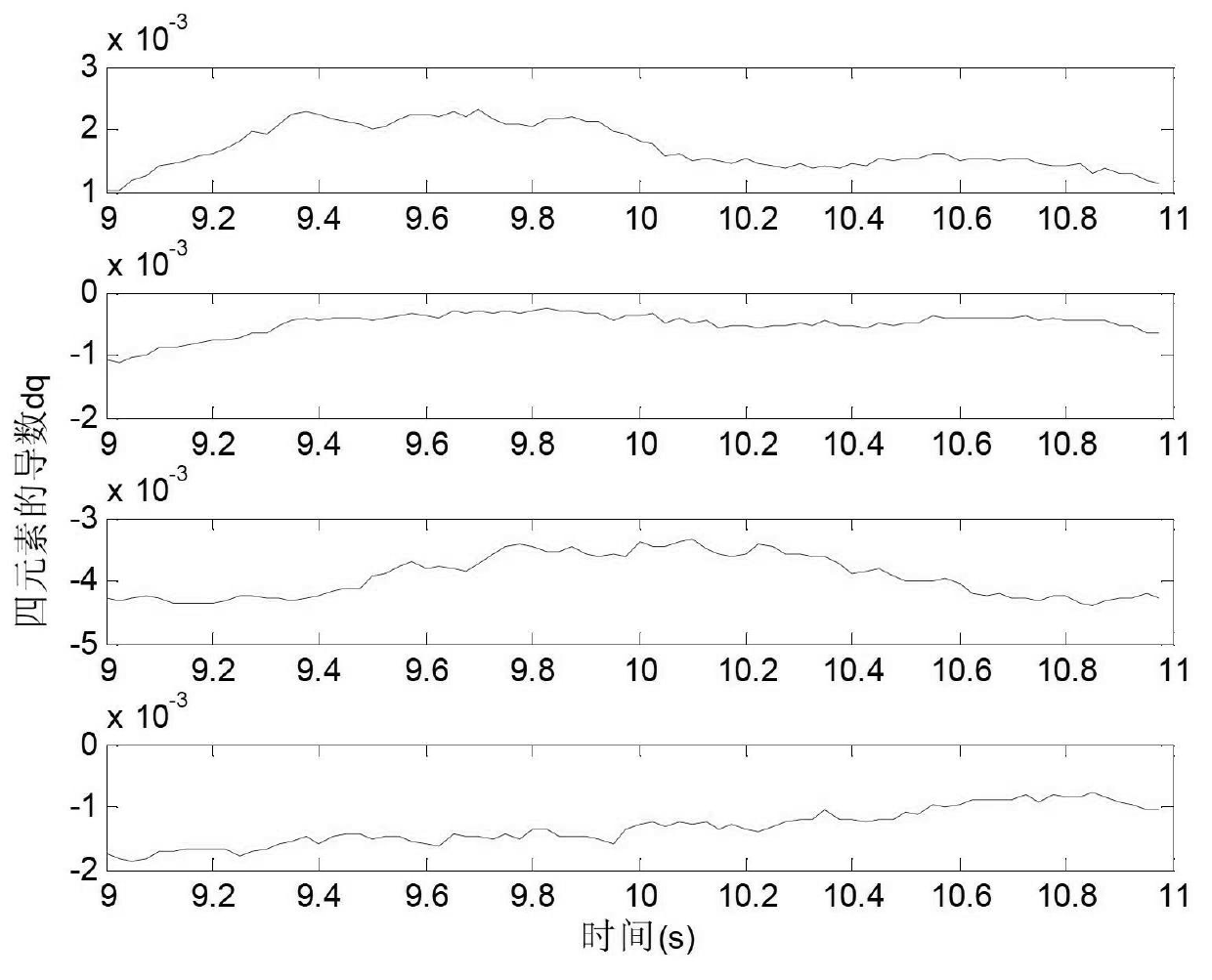
[0048] Execute step 2: if the output parameter of the satellite attitude system is four elements, go directly to step three; if the output parameter of the satellite attitude sensor is Euler angle, obtain the four elements of attitude that are easy to process through the transformation matrix.
[0049] The execution step ...
specific Embodiment approach 3
[0091] Specific Embodiment 3: This embodiment verifies that the method of the present invention also has the ability to diagnose slowly changing faults. For slow-change fault verification: set the satellite gyro sensor on the Y-axis at A slow-change fault occurs, and the fault is a slope of , the fault is described by the following function as .
[0092] The execution steps are as follows: the time interval used in the specific execution process is , the standard deviation of the gyro noise is .
[0093] Execution step 1: Calculate the equivalent vector by formula (4), and the equivalent vector when the satellite inertial gyro group has a slowly changing fault The schematic diagram of the norm is as Figure 7 shown in When it is judged that it is greater than the fault detection threshold , the satellite gyro fails, go to step 2.
[0094] Execute step 2: convert the Euler angles output parameters of the satellite attitude sensor into four elements of attitude ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More