

3D four-wheel aligner with no car pushing required
A four-wheel aligner, 3D technology, applied in wheel testing and other directions, can solve the problems of short time, inaccurate data, different data, etc., to achieve the effect of simple use and accurate data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
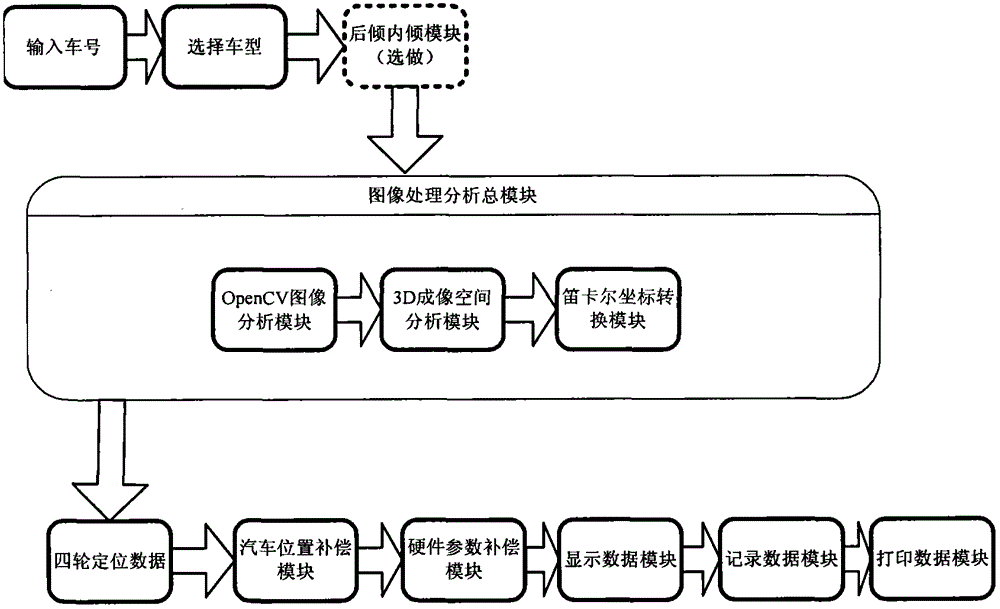
[0029] The main accessories used in this product are a high-configuration computer server and two high-resolution industrial digital cameras. The cameras are fixed at both ends of the camera crossbar. The crossbar is located in front of the car. Perpendicular to lift brackets or trench rails. Keep the crossbar horizontally, and the distance between the crossbar and the center of the lift bracket or the corner plate on the trench track is about 2700mm in the horizontal direction (measured during actual operation). The vertical direction is about 490mm, and the center of the cross bar intersects with the center line of the lift bracket or the trench rail in the front and rear direction of the vehicle as much as possible. In this way, the left and right wheels of the car can be photographed by the two cameras respectively. Target plate fixed to the right rear wheel.
[0030] Because the importance of car front alignment is far greater than rear alignment, so some new cars only ...
Embodiment 2
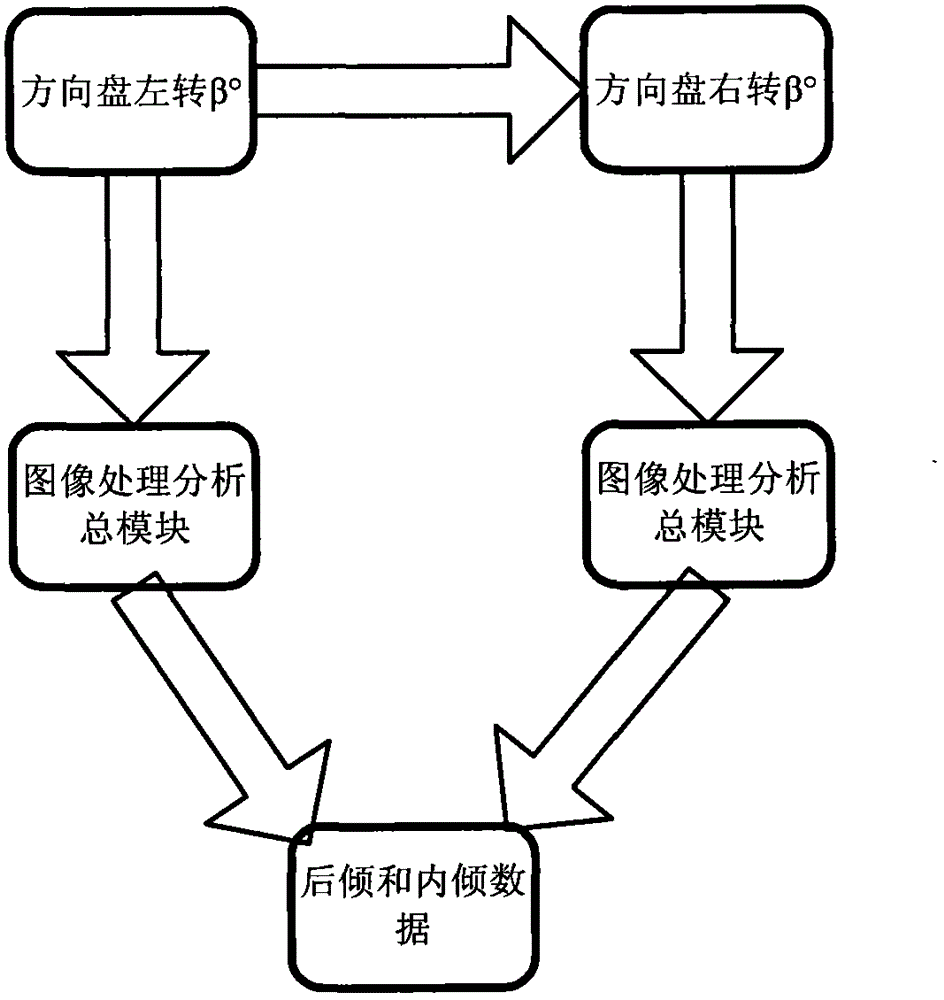
[0041] refer to figure 2 , to measure the inclination and caster angle of the front wheel (optional, because the first is that the inclination test operation is more complicated, and the second is that the steering wheel feels comfortable and does not need to be corrected, so most repairmen do not do this item):
[0042] The inclination angle and caster angle of the front wheel, the inclination angle refers to the angle between the kingpin axis and the tire, and the caster angle refers to the angle between the kingpin axis and the direction of gravity of the earth. The measurement method of the kingpin inclination angle and caster angle is, Click the computer on the positive steering wheel to record the current state of the target wheel, control the camera to capture the image of the target wheel and analyze it, store the analyzed camber and toe-in data in the memory, and then turn the steering wheel to the left to rotate the two front wheels by β° (This degree is known. Ther...
Embodiment 3
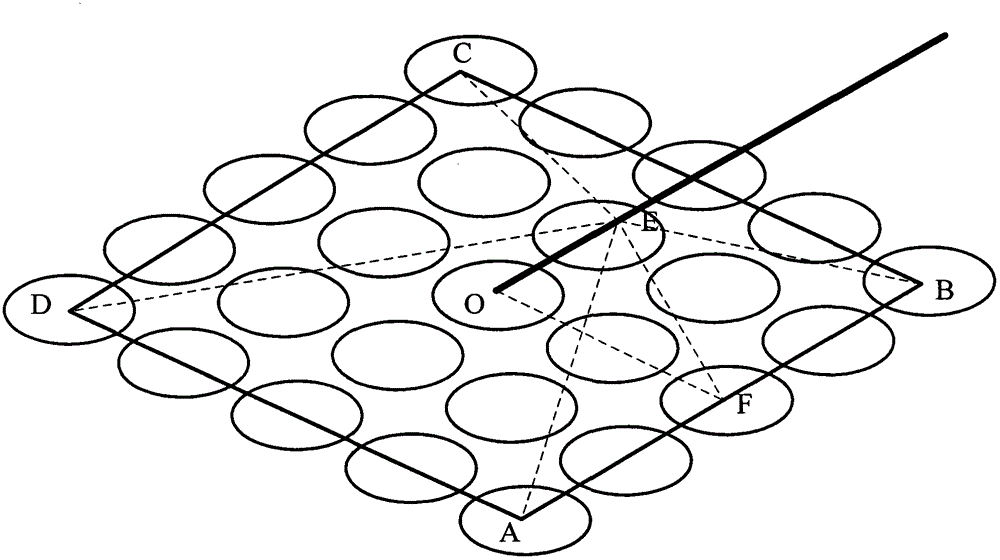
[0044] refer to Figure 5 , Front and rear wheel camber, toe angle test: The camber of the front and rear wheels refers to the angle between the tire and the earth's gravity line. The upper part of the angle is positive when the upper part of the tire is biased outward, and negative if it is biased inward. The toe angle of the front and rear wheels refers to the angle between the tire and the front and rear direction of the car. The front of the tire is positive inward and negative inward. Since the target disc is clamped on the tire rim by a high-precision four-claw clamp, Through the space position of the target disc calculated above, the camber and toe-in of the target disc can be obtained, then the camber and toe-in of the car tires are the corresponding camber and toe-in of the target disc.
[0045] First, control the camera to capture the color picture of the target disk in the camera, and use opencv to convert the color picture into a black and white picture. Then obta...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More