

Sitting and lying type lower limb rehabilitation robot
A rehabilitation robot and robot technology, applied in artificial respiration, gymnastics equipment, passive exercise equipment, etc., can solve the problem of not being able to stimulate patients' active desire to exercise in real time, and achieve the effect of improving the rehabilitation process and increasing enthusiasm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
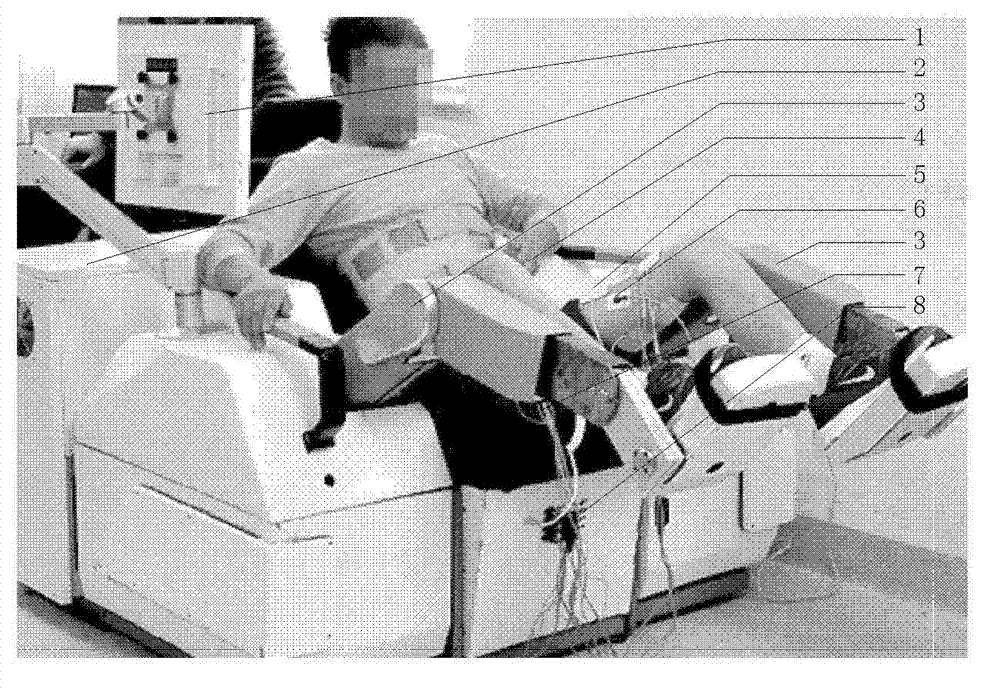
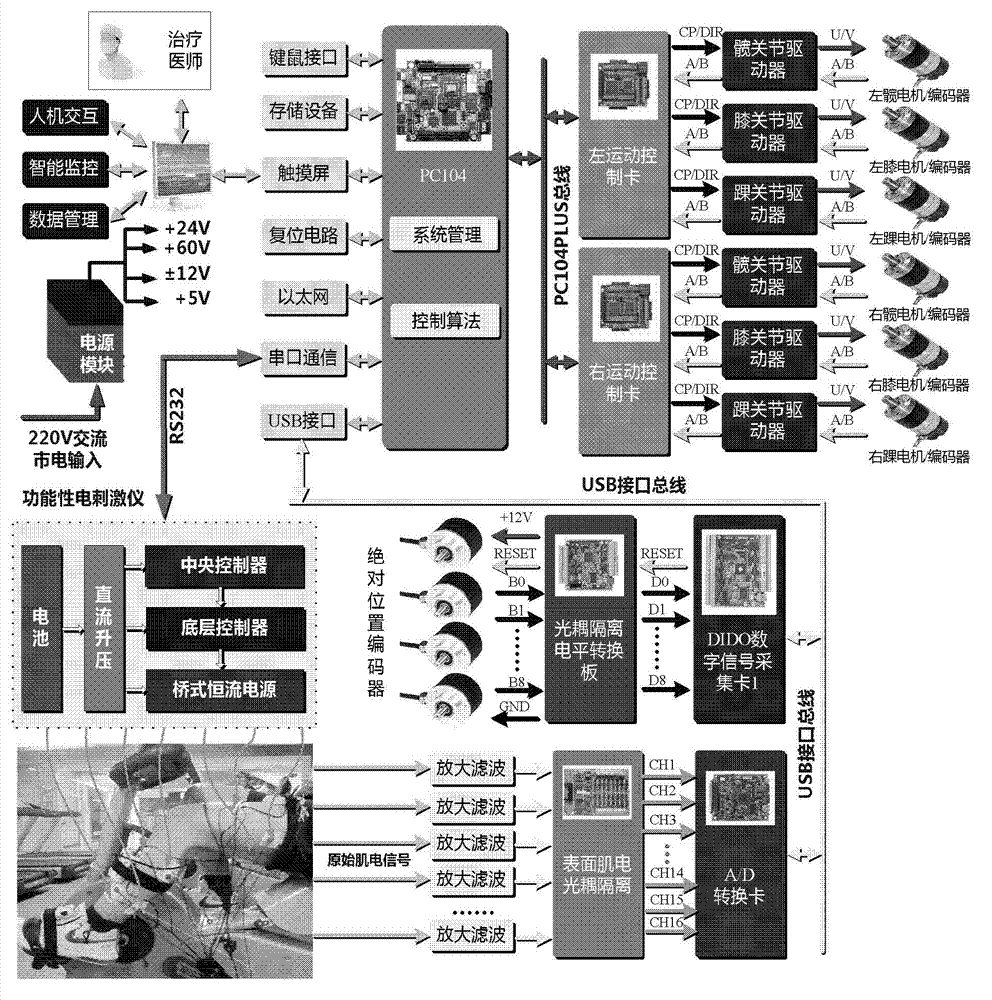
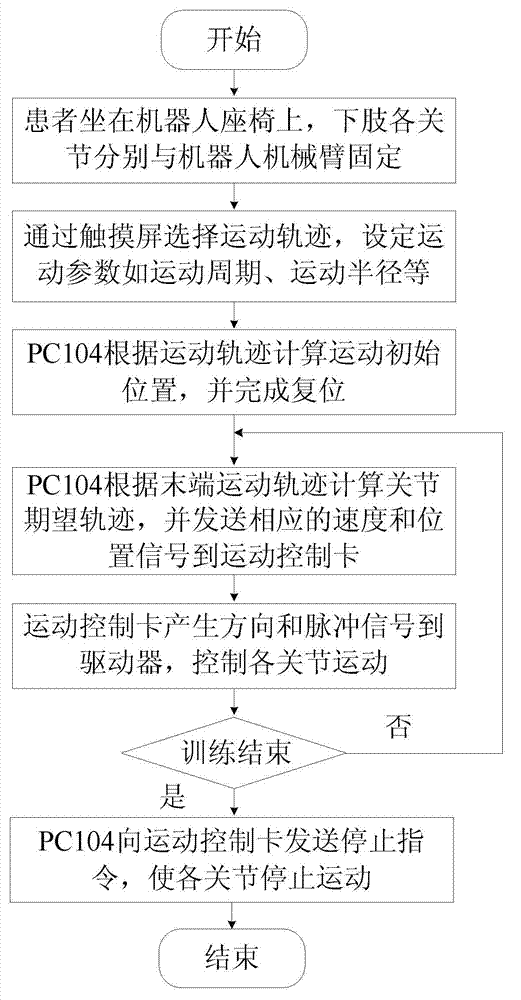
[0019] figure 1 is a structural diagram of a sitting-lying lower limb rehabilitation robot according to an embodiment of the present invention, such as figure 1 As shown, the sitting and lying lower limb rehabilitation robot of the present invention is composed of two parts, a mechanical body and an electrical control system, wherein the mechanical body includes a seat 7 and two mechanical arms 3, and each mechanical arm 3 has three degrees of freedom (joints) , respectively corresponding to the hip, knee, and ankle joints of the lower limbs of the human body. The degrees of freedom of the mechanical arm are also called the joints of the robot or the joints of the mechanical arm; the electrical control system includes a m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More