Embedded monocular passive target tracking positioning system and method based on FPGA (Field Programmable Gate Array)
A target tracking and positioning system technology, which is applied in the field of photoelectric detection, can solve the problems of reliability influence in the positioning process, many calculation parameters, and complexity, etc., and achieve the effect of eliminating background light and noise interference, reducing the amount of calculation, and improving reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
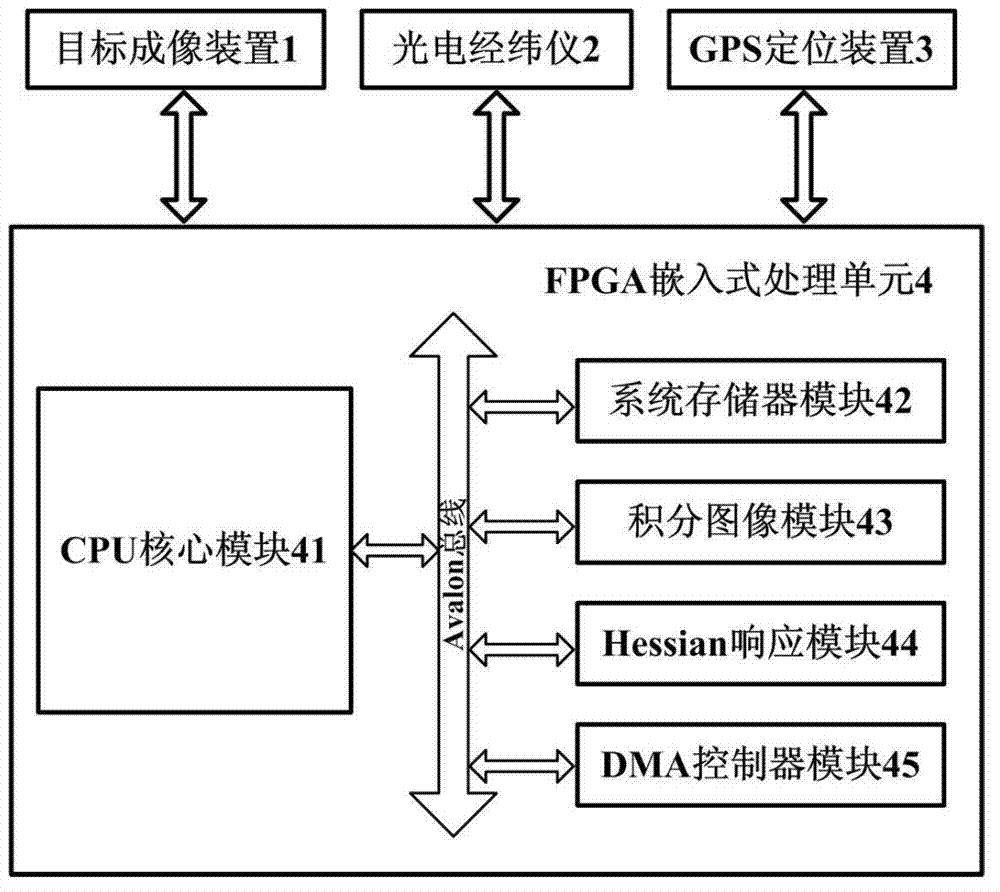
[0033] refer to figure 1 , The positioning system of the present invention includes a target imaging device 1, a photoelectric theodolite 2, a GPS positioning device 3 and an FPGA embedded processing unit 4. The target imaging device 1 uses a black and white CCD camera with a resolution of 400 lines or above for optical imaging of the target; the photoelectric theodolite 2 uses a DJ1 or above photoelectric theodolite to obtain the angle information of the target relative to the system; GPS positioning device 3Use a serial port type universal GPS receiver to obtain the spatial position information of the system itself. Target imaging device 1, photoelectric theodolite 2 and GPS positioning device 3 are respectively connected to FPGA embedded processing unit 4, and the obtained target image, target angle information and spatial position information of the system are transmitted to FPGA embedded processing unit 4.
[0034] The FPGA embedded processing unit 4 is the core of the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



