

Method for measuring absolute position of rotor in motor servo system
A servo system and absolute position technology, applied in the direction of measuring devices, instruments, etc., can solve the problems of no recovery ability, unable to give absolute zero position, etc., to improve cost performance, reduce signal processing circuits and coarse-fine coupling operations, and simplify machinery structure effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0077] The present invention can be realized with another kind of method, and its concrete realization steps (1), (3), (4) are identical with above-mentioned invention realization steps, and the realization method of step (2) is as follows:
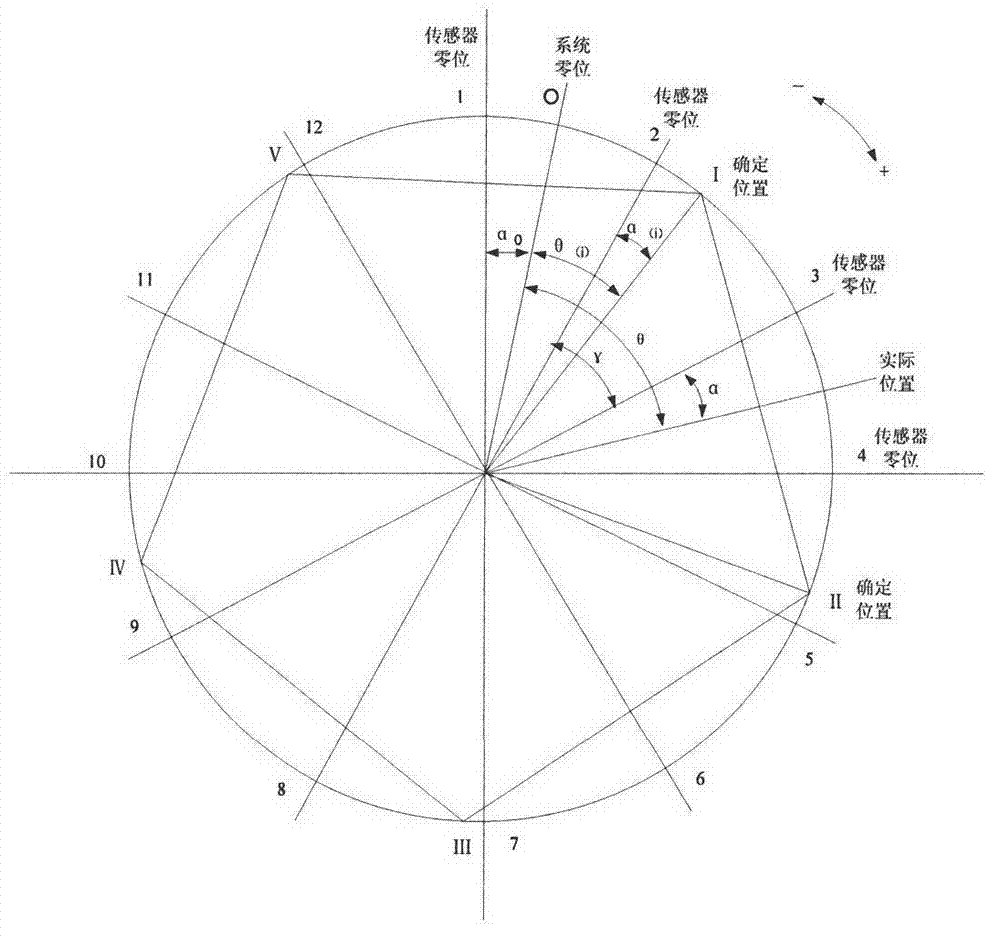
[0078] First, the relative position angle α of any one of the M determined positions is known 1 and pitch number P 1 The one-to-one mapping relationship;
[0079] Then, using the relation: α (i) = α 1 +(β×m-γ×P (i) ), i∈[1,M]
[0080] The one-to-one mapping relationship between the relative position angle and the pitch number of the remaining M-1 determined positions is calculated. in:
[0081] 0≤m≤M, 0≤P (i) ≤N, 0≤α 1 ≤360° / N, 0≤α (i) ≤360° / N;
[0082] N is the number of pole pairs of the position sensor;
[0083] γ is the pitch angle of the position sensor;
[0084] M is the cycle number of the stable position when the motor rotor rotates one revolution;
[0085] β is the periodic angle between two adjacent stable positions...
Embodiment 2
[0088] The present invention can also be realized with a third method, and its concrete realization steps (1), (4) are identical with the implementation steps of the present invention, and the realization method of step (2) is as follows:
[0089] Measure the relative position angle α of any one of the M determined positions 1 and pitch number P 1 The one-to-one mapping relationship;
[0090] The implementation method of step (3) is as follows:
[0091] First, using the same positioning method as step (2), position the position sensor rotor to any one of the M determined positions in step (2), and measure the relative position angle of the position sensor rotor;
[0092] Then, using the relation: α (i) = α 1 +(β×m-γ×P 0 ), i ∈ [1, M]
[0093] Calculate the relative position angle α of the determined position (i) and initial pitch number P 0 One-to-one mapping relationship. in:
[0094] 0≤m≤M, 0≤P 0 ≤N, 0≤α 1 ≤360° / N, 0≤α 0 ≤360° / N;
[0095] N is the number of pol...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More