

ARM and FPGA (Field Programmable Gate Array) architecture based autopilot of fixed wing unmanned aerial vehicle
An autopilot, UAV technology, applied in three-dimensional position/channel control and other directions, can solve the problems of affecting the response speed of the system, large size, low system integration, etc., to reduce additional workload, fast system response, The effect of high work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be described in more detail below in conjunction with the accompanying drawings.
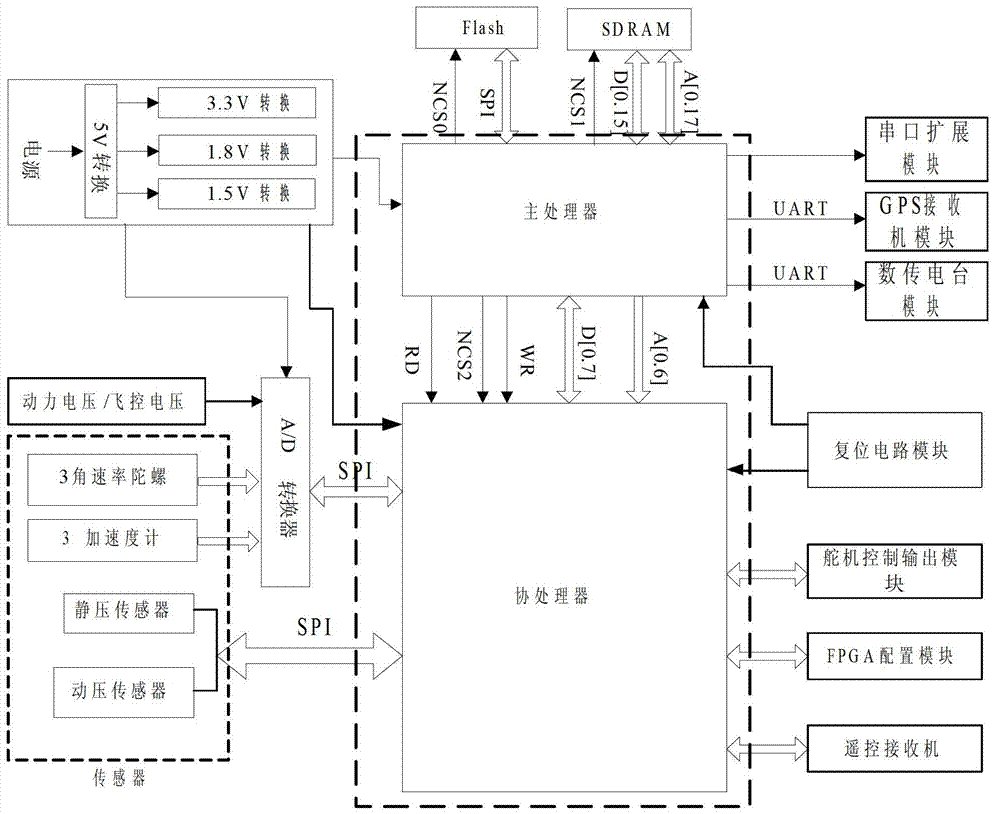
[0036] The block diagram of the present invention is as Figure 1 As shown, including processor module, FLASH module, SDRAM module, FPGA configuration module, sensor module, A / D conversion module, serial port expansion module, servo control signal output module, remote control receiver module, reset circuit module, system power supply module .
[0037] The processor module includes a main processor ARM and a coprocessor FPGA. In the present invention, main processor selects the AT91RM9200 based on ARM9TDMI kernel for use, and it adopts the BGA package of 256 pins, and the performance is up to 200MIPS when working at 180MHz, and the memory management unit has a data cache of 16KB, an instruction cache of 16KB, and its internal SRAM16K, ROM128K , cannot meet the requirements of the present invention, and therefore must be expanded. Coprocessor in the present inv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More