

Lizard-imitated overwater robot
A technology of robots and lizards, which is applied in the field of robots, can solve the problems of limited range of use of water sports robots, difficulties for robots to work on water, and low availability, and achieve the effects of saving production costs, improving balance, and reducing total mass
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
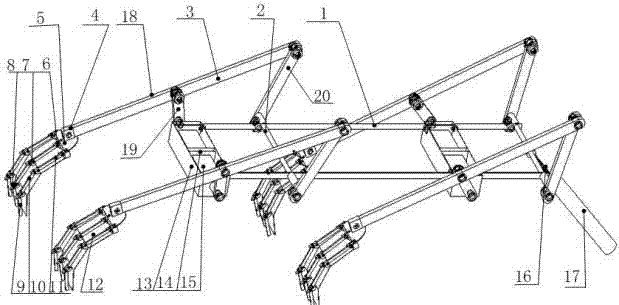
[0036] Reference figure 1 with figure 2 , The lizard-like water robot includes a main body 1 and four identical leg mechanisms 3, characterized in that: the front part and the rear part of the main body 1 are each installed with two motors 15 through a motor mounting box 3. A motor 15 drives the four leg mechanisms 3 respectively; the front ends of the four leg mechanisms 3 are respectively connected to a sole through a wrist block 5; a tail 17 is installed at the rear of the main body 1.
Embodiment 2
[0038] This embodiment is basically the same as the first embodiment, and the special features are as follows:
[0039] The main body 1 adopts a frame structure, leaving only some necessary connections: the connection between the body and the legs of the robot, and the installation position of the motor box 13 where the motor 15 is installed.
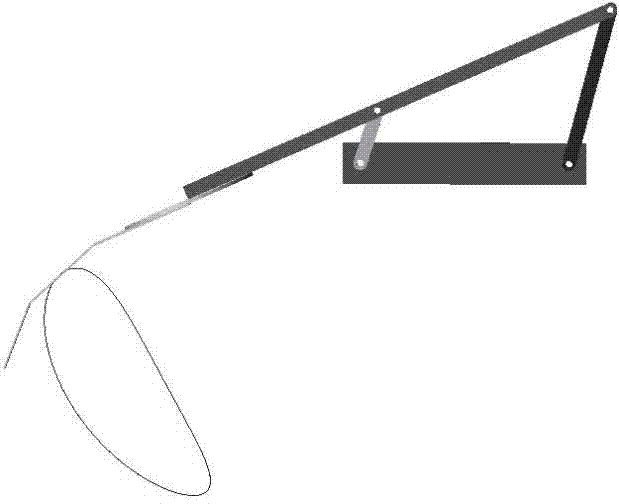
[0040] The leg mechanism 3 is a four-bar linkage mechanism, and its simulated motion track is similar to that of a basilisk lizard.
[0041] The four-bar linkage mechanism is: the middle and rear end of a leg extension link 18 are hinged with one end of a short rocker 19 and a long rocker 20, and the other end of the short rocker 19 is hinged with The output shaft of the motor 15 is connected, the other end of the long rocker 20 is hinged with the main body 1, and the front end of the leg extension link 18 is connected with the wrist block 5.
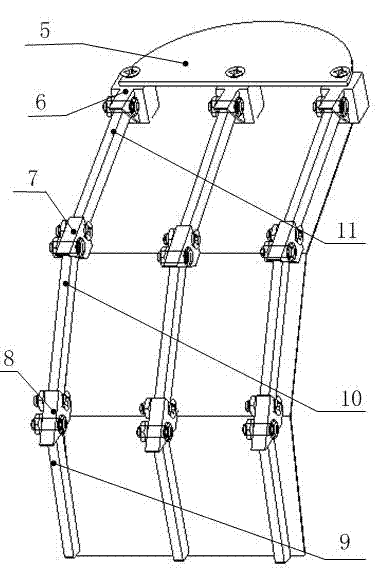
[0042] The sole of the foot is composed of three identical toe-like structures 6, 7, and 8 and a palm...
Embodiment 3
[0046] Such as figure 1 As shown, this embodiment mainly includes a main body 1 and four leg mechanisms 3. All rotating pairs in the robot are connected by pins. In order to reduce the total weight of the present invention, save materials, and reduce the required driving power, the main body 1 has a frame structure as a whole. The leg mechanism 3 is an ordinary four-bar linkage mechanism. Such as image 3 As shown, the four-bar linkage used in the present invention can produce an elliptical trajectory similar to that of a basilisk lizard. The pin in the hole at one end of the crank on the leg drive mechanism 3 and the motor spindle of the coreless motor 11 are connected together by a coupling. The rocker and the robot body-leg connecting rod 2 are fixed by screws, and the end of the connecting rod is passed through the leg —The wrist connector 4 and the robot wrist block 5 are fixed with screws. The fuselage motor box 13 is fixed on the main robot body 1 by screws, and the t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More