

Five-freedom-degree series-parallel lower limb rehabilitation robot
A technology of rehabilitation robot and degree of freedom, which is applied in gymnastics equipment, muscle training equipment, passive exercise equipment, etc. It can solve problems such as complex structure, troublesome control, and insufficient attention paid to patients' early recovery, and achieve relatively high rigidity and low cost. Inexpensive, simple structure effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
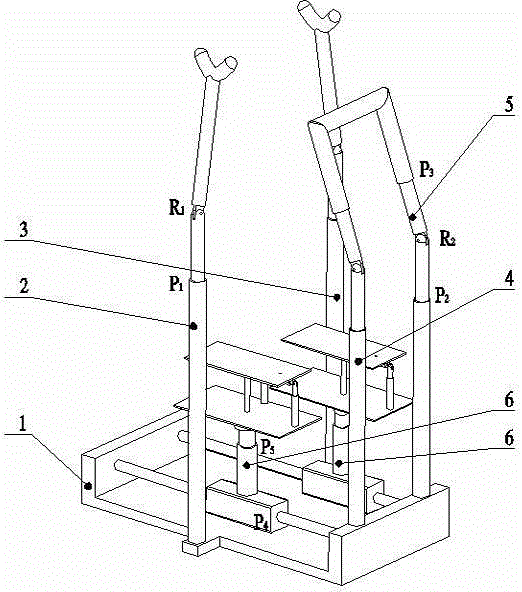
[0014] The five-degree-of-freedom lower limb rehabilitation robot mentioned in the present invention is composed of three parts, a frame and two motion platforms, which can realize Y and Z axial movement and rotation around X, Y and Z axes. The frame is formed by connecting the base 1 and the bracket in series, and two moving guide rails are distributed in parallel inside the base 1; the bracket includes four branch chains, which are support chain A 2, support chain B 3, handrail chain A 4, and handrail chain B 5; The support chain A 2 and the support chain B 3 have the same structure. They are composed of the moving pair P1 and the rotating pair R1 in series, and are vertically connected to the left and right ends of the base. The structure of the handrail chain A 4 and the handrail chain B 5 is also the same. The pair R2 and the mobile pair P3 are connected in series, and are vertically connected to the front end of the base. In this way, the support chain can realize Z-dire...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More