

Blood vessel interventional operation conduit or guide wire control device based on two-point clamping
A technology for manipulating devices and interventional surgery, applied in the direction of catheters, surgical robots, etc., can solve the problems of continuous advancement of catheters, thick catheters, narrow medical application range, etc., to overcome the loss of manipulation accuracy, increase the upper limit of friction, and improve the reliability manipulative effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
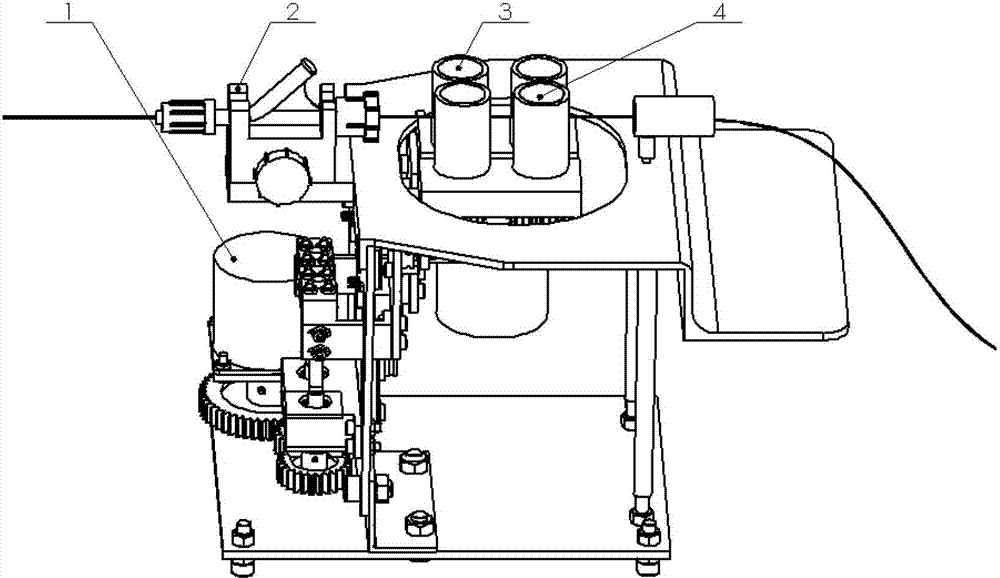
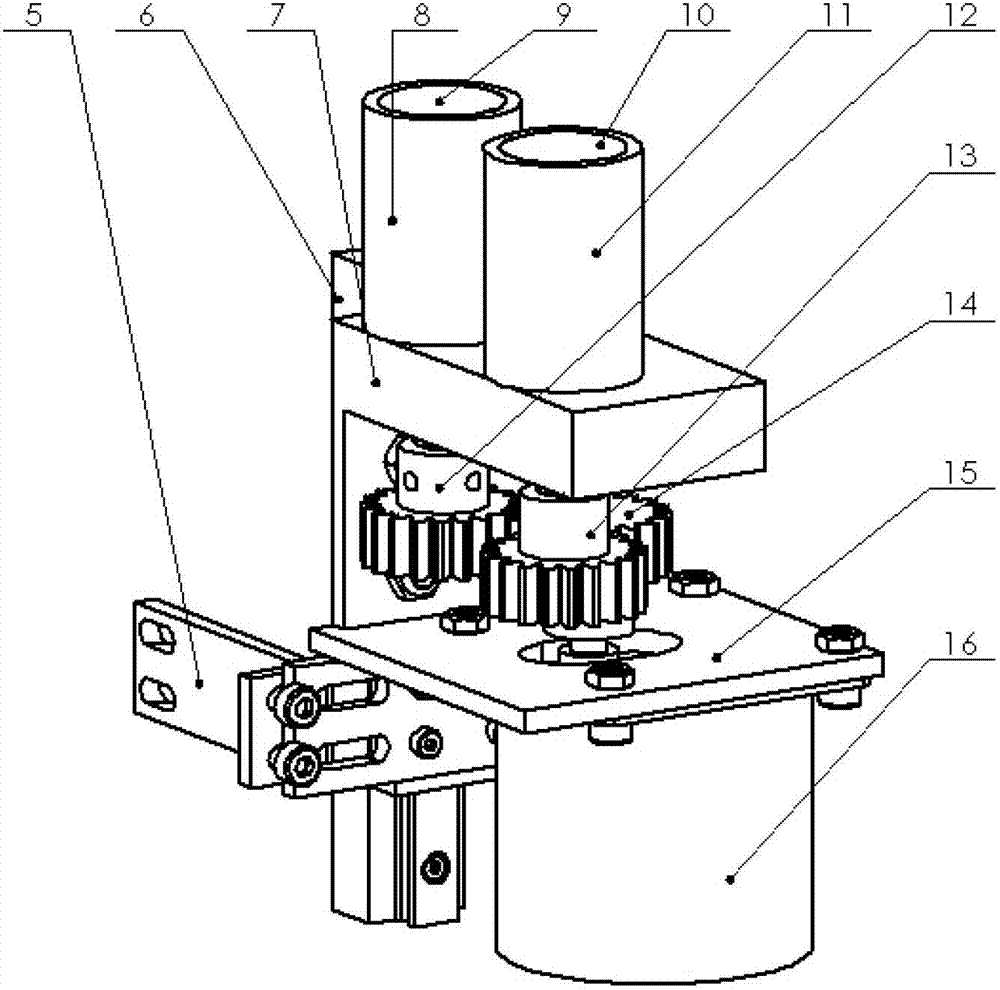
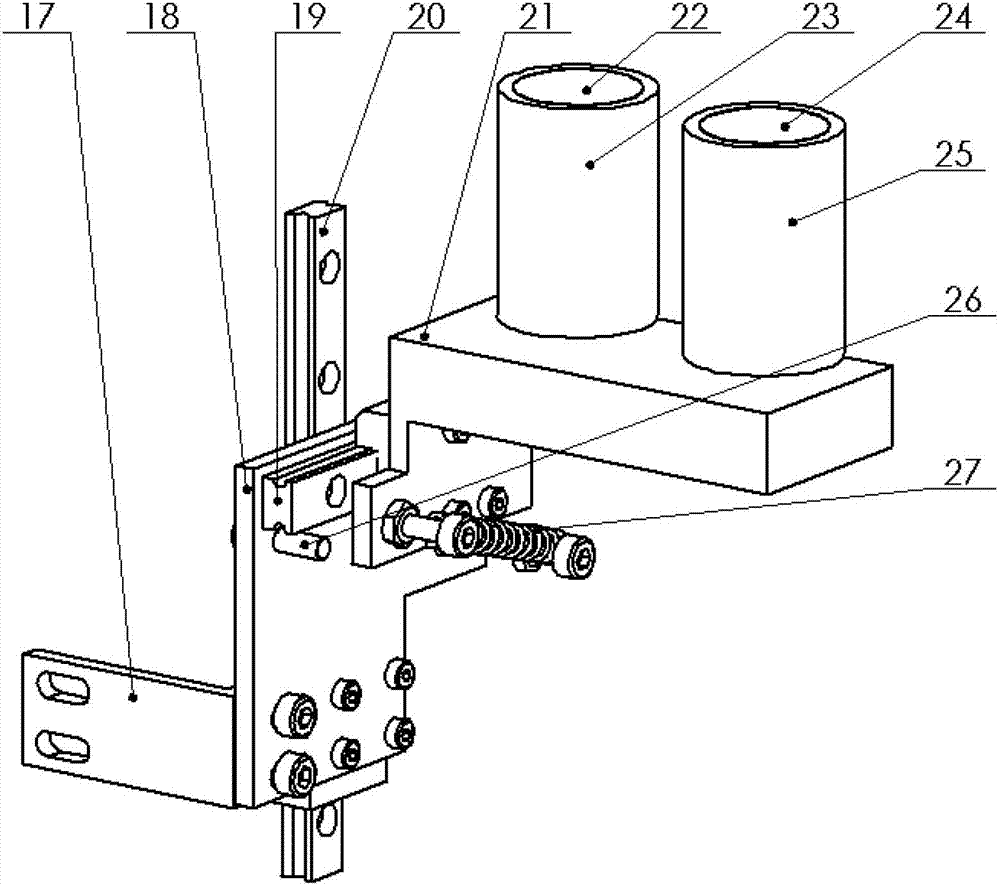
[0013] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
[0014] The meanings of the reference signs appearing in the drawings of this application specification are as follows: drive assembly 1, catheter or guide wire guide assembly 2, main finger assembly 3, auxiliary finger assembly 4, connecting plate 5, guide rail pair 6, bearing support unit 7, Rubber sleeve 8, roller 9, roller 10, rubber sleeve 11, gear 12, gear 13, gear 14, motor frame 15, propulsion motor 16, connecting plate 17, sub-finger assembly bottom plate 18, horizontal guide rail 19, vertical guide rail 20, Bearing support unit 21, roller shaft 22, rubber sleeve 23, roller shaft 24, rubber sleeve 25, limit block 26, spring 27, nut connecting frame 28, nut connecting frame 29, lead screw 30, lead screw 31, bearing ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More