

Airborne distributed inertial attitude measurement system and transfer alignment method of airborne distributed inertial attitude measurement system
A distributed, attitude measurement technology, applied in the field of inertial attitude measurement, can solve the problems of low precision, difficult to meet requirements, and accumulation of measurement errors, and achieve the effects of low cost, high integration and small size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
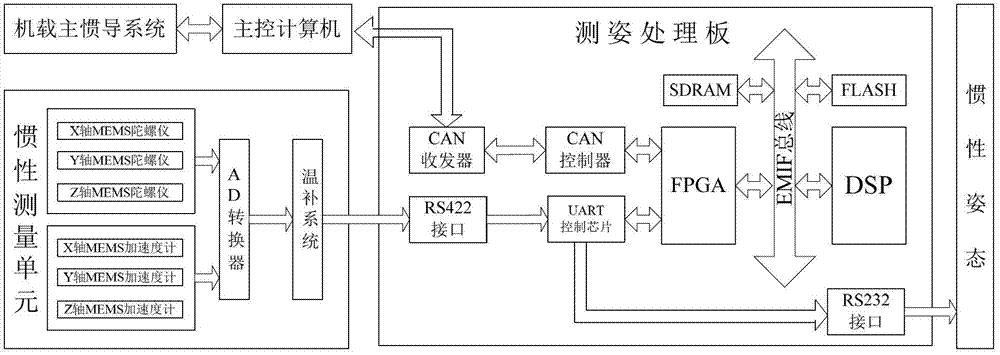
[0113] to combine Figure 5 , the hardware structure diagram of the transmission alignment sports car experiment of the airborne distributed inertial attitude measurement system of the present invention: the main and sub inertial guides are installed on an iron plate with a large installation error angle to simulate the installation position on the aircraft, The main inertial navigation system generates high-precision navigation parameters, which are sent to the main control computer at a certain frequency through the serial port. The main control computer converts the received navigation parameters into CAN bus data and sends them to the sub-inertial navigation system navigation computer, together with the sub-inertial navigation system Complete transfer alignment and output high-precision navigation information in real time.
[0114] In view of the fact that the installation error angle between the sub-inertial navigation system and the main inertial navigation system at dif...
Embodiment 2
[0117] Same as Embodiment 1, set the z-axis installation error angle compensation angle ξ z =32.5°, the installation error angle estimation curve of the second transfer alignment sports car experiment is as follows Figure 7 shown.
Embodiment 3
[0119] Same as Embodiment 1, the difference is that the z-axis installation error angle compensation angle ξ z =32°, the estimation curve of installation error angle in transfer alignment sports car experiment is as follows Figure 8 shown.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More