

Point cloud data partitioning method based on three-dimensional laser radar
A point cloud data and 3D laser technology, applied in image data processing, image analysis, instruments, etc., can solve problems such as unfavorable engineering implementation, complex methods, and inability to handle static and low-speed vehicles better, achieving strong reliability, The effect of high detection accuracy and improved efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
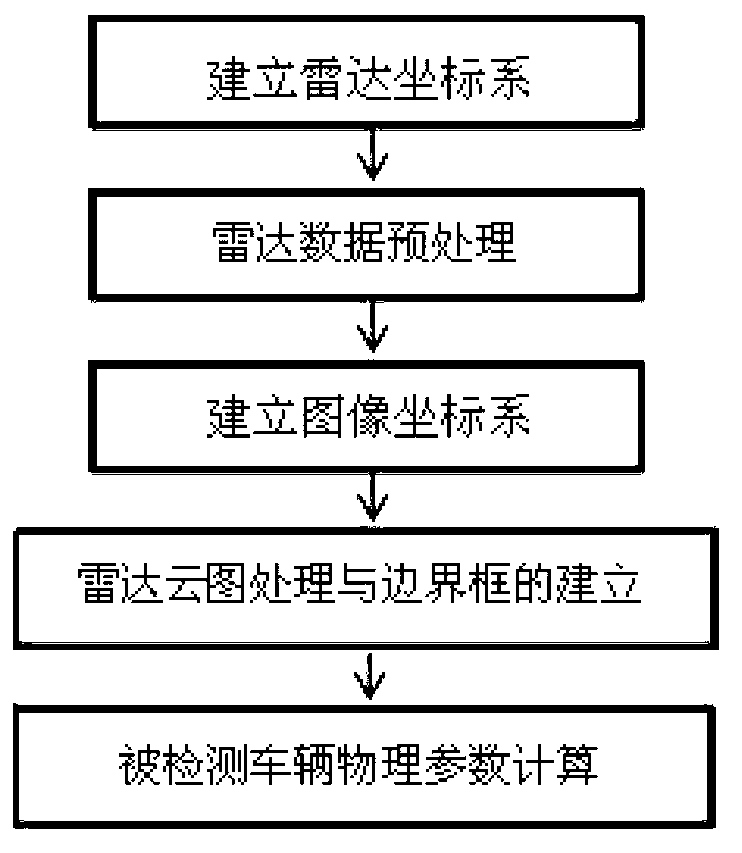
[0022] Such as figure 1 As shown, the present invention provides a kind of point cloud data segmentation method based on three-dimensional lidar, and it comprises the following steps:
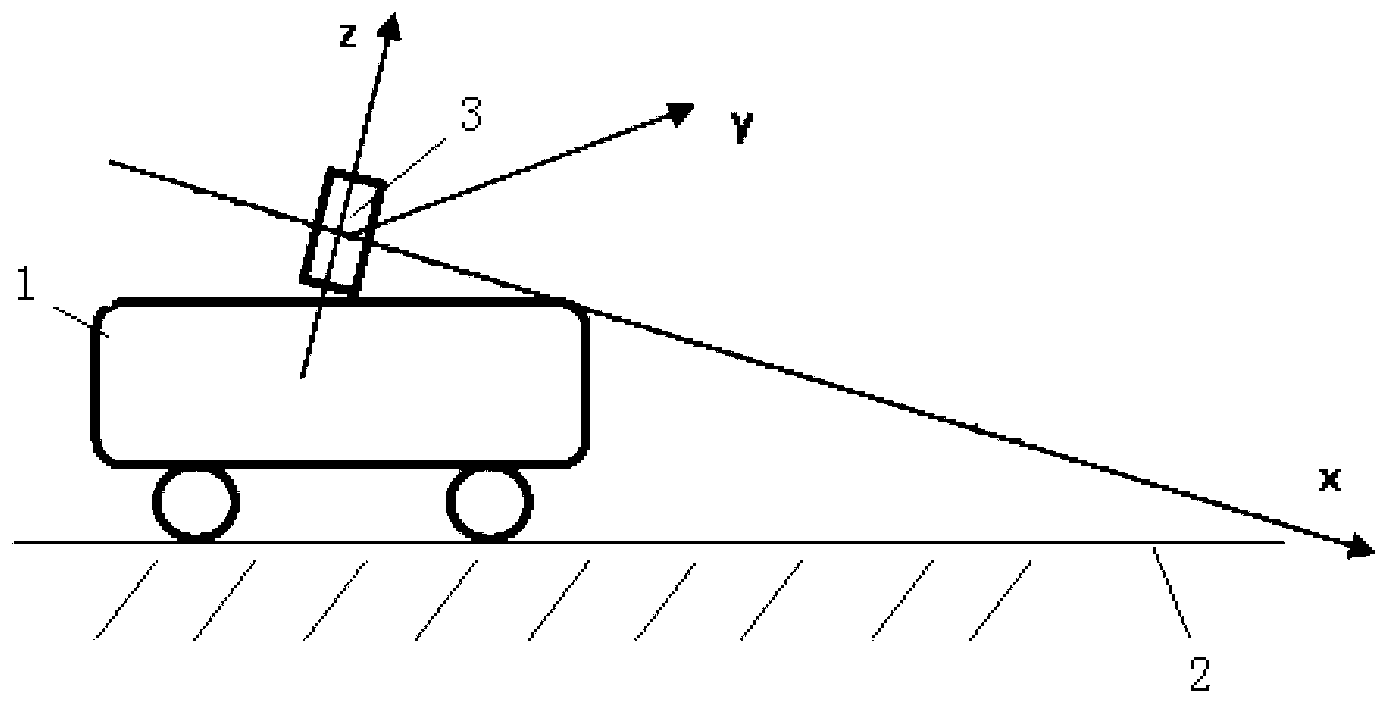
[0023] 1) Establish the radar coordinate system oxyz for detecting vehicles.
[0024] Such as figure 2 As shown, the radar coordinate system oxyz means that when the detection vehicle 1 is in a stationary state on the horizontal road surface 2, the detection vehicle 1 is installed with the laser radar 3, and the center of the laser radar 3 is the coordinate origin o, and the x-axis passes through the origin o And parallel to the horizontal section of the lidar 3, pointing to the forward direction of the detection vehicle 1, the z-axis points upward through the origin o parallel to the longitudinal section of the lidar 3, and the y-axis is perpendicular to the plane ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More