

System and method for real-time fault monitoring of lifting hoisting-synergic flexible cable parallel kinematic machine
A monitoring system and real-time fault technology, applied in safety devices, transportation and packaging, load suspension components, etc., can solve problems such as load overload, insufficient pressure of hydraulic system, intermittent movement, etc., to achieve strong anti-interference ability and realize automation , low cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
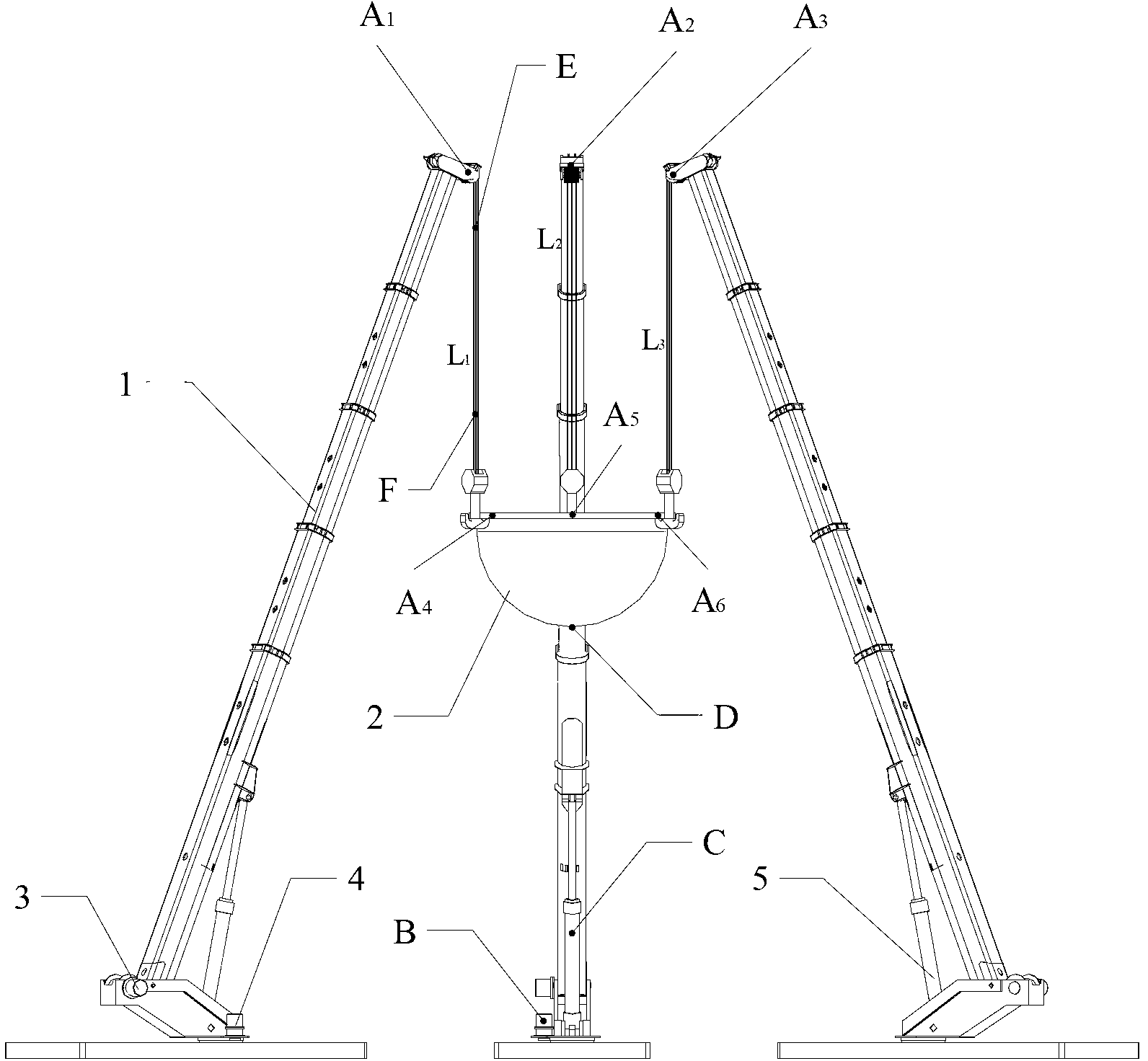
[0021] Example 1: figure 1 In this example, the main structure of the monitoring system is mainly shown on the platform of a large-scale heavy-duty hoisting with six degrees of freedom in space and a flexible cable parallel configuration equipment.
[0022] In this example, the space six-degree-of-freedom large-scale heavy-duty hoisting and hoisting cooperative flexible cable parallel configuration equipment is mainly composed of three hoisting equipment 1 and hoisting weights 2 with the same structure in a triangular distribution of hoisting weights, wherein Each hoisting equipment includes a luffing device, a slewing device and a hoisting device.
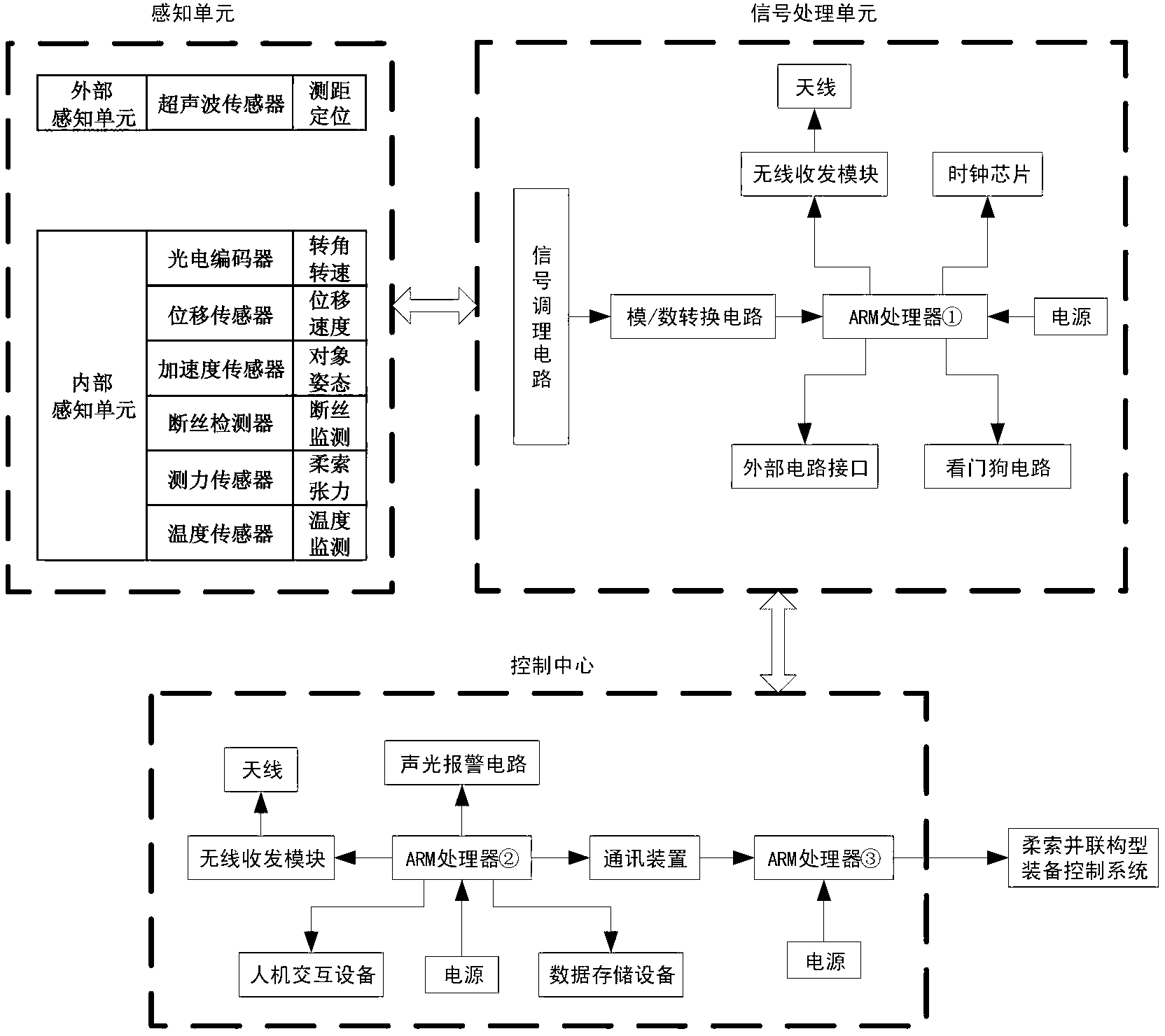
[0023] In this example, there are multiple ultrasonic sensors A, which are installed on each lifting device 1 and heavy object 2 equipped in a parallel configuration according to the arrangement of nodes;
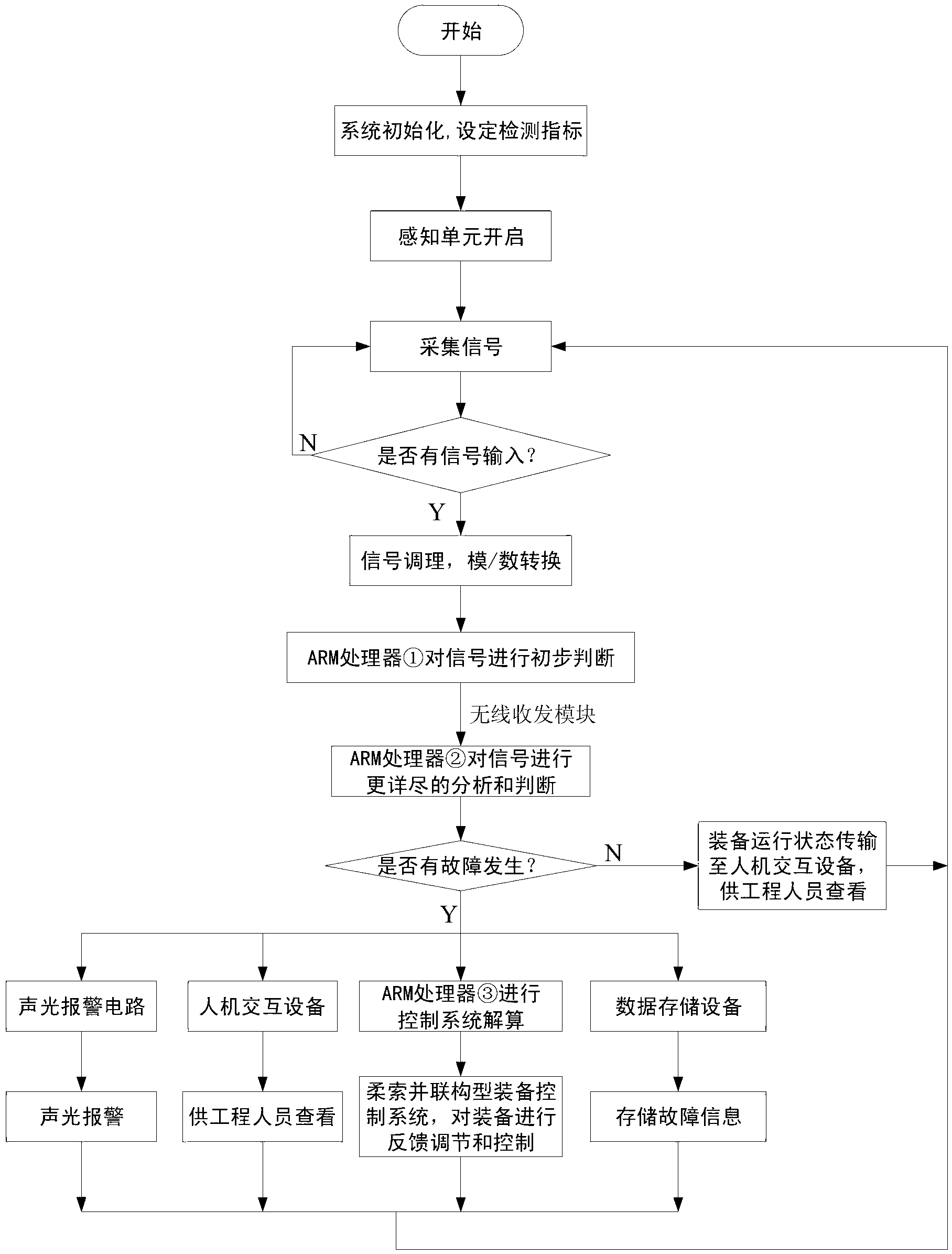
[0024] There are multiple photoelectric encoders B, high-resolution incremental photoelectric encoders are selected, and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More