

Space positioning system for intelligent assembly and space positioning method for intelligent assembly
A space positioning and intelligent technology, applied in the direction of using optical devices, measuring devices, instruments, etc., can solve the problems of poor installation accuracy and consistency, high labor intensity, low efficiency, etc., to improve accuracy, improve positioning efficiency, and improve execution efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] In order to better understand the technical solution of the present invention, the following will be described in detail through specific examples:
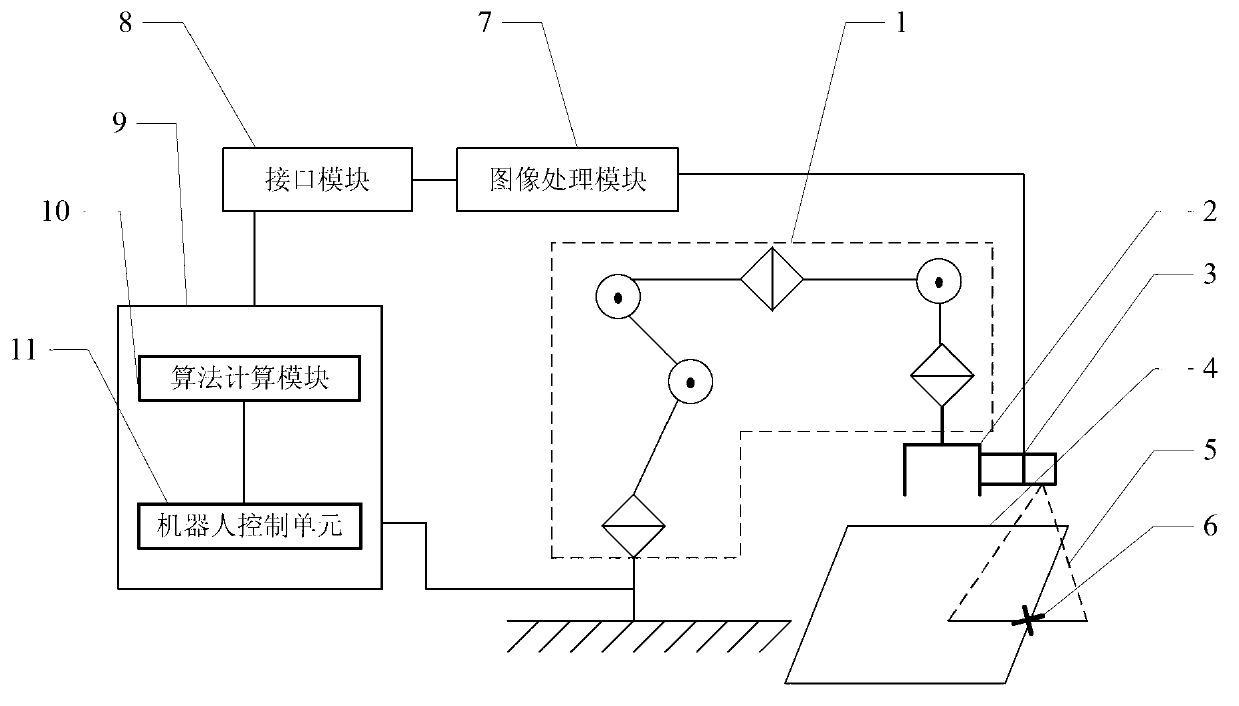
[0044] see figure 1 , the space positioning system for intelligent assembly of the present invention includes a robot control cabinet 9, a robot module, a 3DL camera 5, an image processing module 7, an interface module 8, an algorithm calculation module 10 and a target object 4 to be positioned.
[0045] The robot module includes a robot body 1, a robot control unit 11 connected with the robot body 1 signal and installed in the robot control cabinet 9, and a robot hand grip 2 installed on the robot body 1; wherein, the robot body 1 is a standard six degrees of freedom articulated robot or a robot with few degrees of freedom that can meet the motion requirements or other similar equipment. The robot control unit 11 is the necessary software and hardware equipment for controlling the robot body 1, the first choice is the st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More