

Robot neural network type computed torque controller training platform and training method
An artificial neural network and neural network technology, applied in the field of high-speed parallel robot neural network computing torque controller training platform, can solve the problems of difficult application of neural network model controller, unaffordable cost, equipment accident, etc. Robust and global progressive stability, fast construction, guaranteed effectiveness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with accompanying drawing:
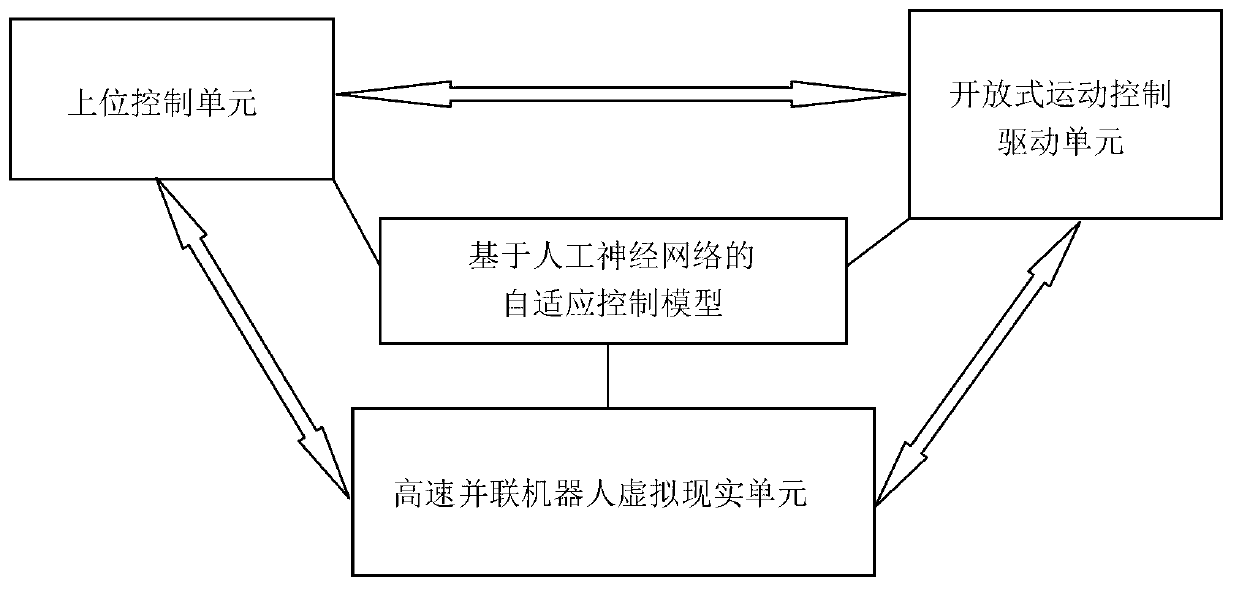
[0031] Such as figure 1As shown in the figure, a robot neural network-based computational torque controller training platform consists of an upper control unit, an open motion control drive unit, a high-speed parallel robot virtual reality unit, a data acquisition and communication unit, and an adaptive control model based on artificial neural networks. ; The upper control unit completes motion planning and process monitoring; the open motion control drive unit includes a motion controller, a driver, and a servo motor, and is a real electric part that completes the conversion of the upper control unit control instruction to the electric control drive; The high-speed parallel robot virtual reality unit can realize the construction of a high-speed parallel robot virtual machine and related three-dimensional scenes; the data acquisition and communication unit realizes the abov...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More