

Mobile modularized self-reconfigurable robot
A mobile module and self-reconfiguration technology, applied in the field of robotics, can solve the problems of wheel vacating, affecting the realization of functions, and limiting the independent movement of a single module, so as to achieve the effect of improving flexibility and adaptability, prolonging service life, and improving transmission efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
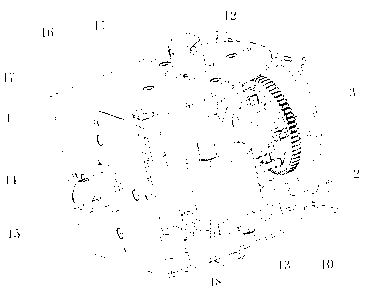
[0039] Such as figure 1 , figure 2 As shown, the mobile modular self-reconfigurable robot is a 100*100*122 cuboid, including a U-shaped outer frame 1, a U-shaped inner frame 2, and a motor frame 10 , a first stepper motor 4, a second stepper motor 18, a third stepper motor 15, two DC motors 17, an inner frame coupling 11, an active connection mechanism, three passive connection mechanisms, That is, the first passive connection mechanism 12, the second passive connection mechanism 13, the third passive connection mechanism 14, two driving legs 16, the two driving legs 16 of the movable modular self-reconfigurable robot rotate continuously in the same direction in the DC motor 17 Next, rely on the friction with the ground to drive the module to move back and forth, and the two driving legs 16 drive the module to turn and move under the reverse continuous rotation of the DC motor 17, relying on the friction with the ground.
[0040] This module can be driven by the second...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More