

Kinematics real-time solving method based on seven-DOF space manipulator of FPGA
A space robotic arm and kinematics technology, applied in the field of robotics, to achieve the effects of small size, reduced cost and low energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Specific embodiments of the present invention are described below in more detail with reference to the accompanying drawings.
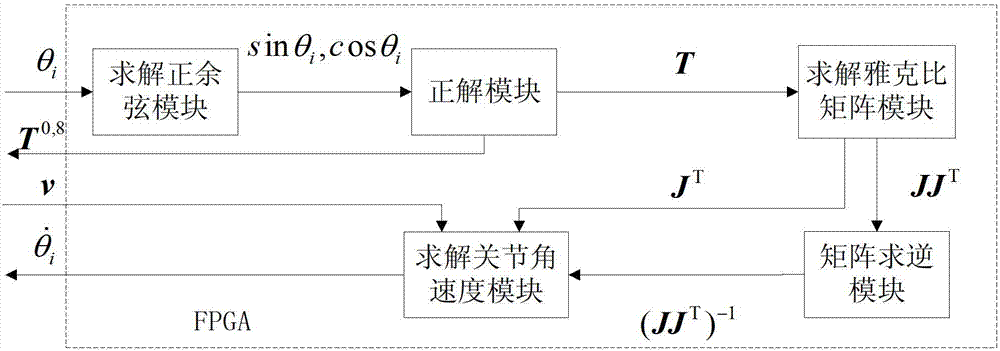
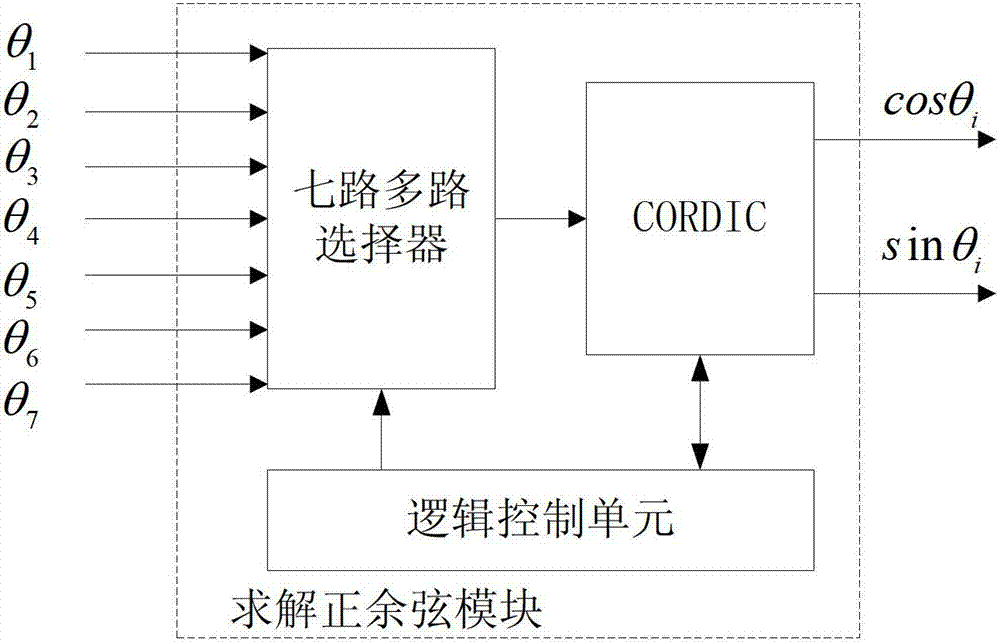
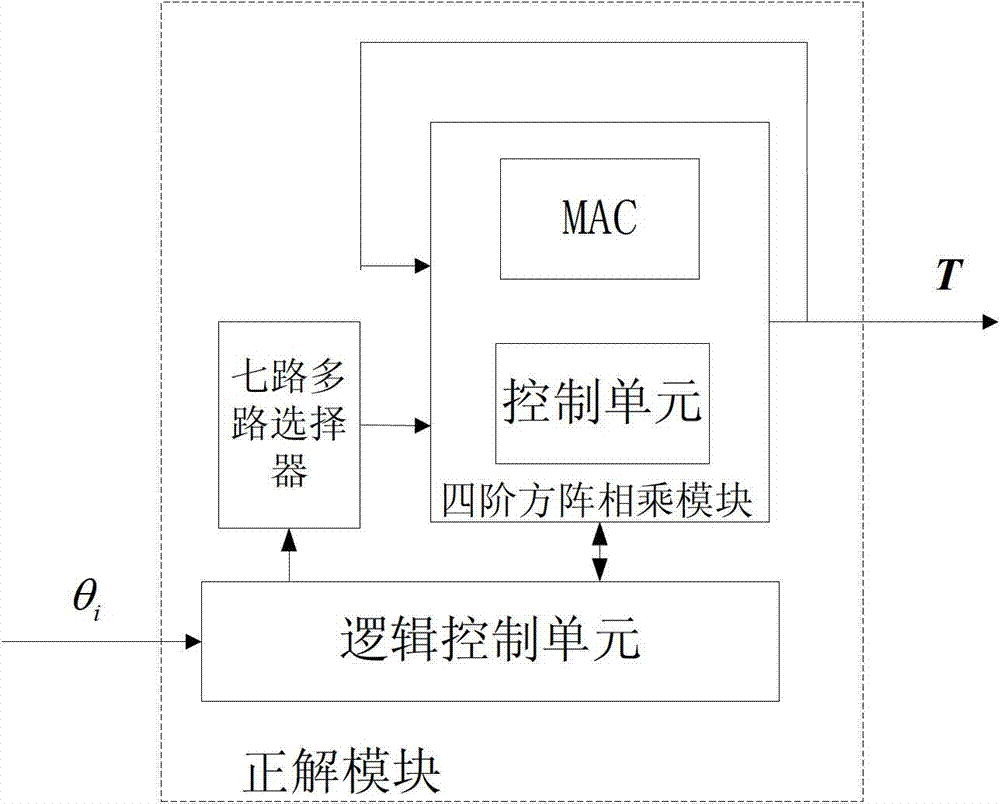
[0026] like figure 1 Shown is the real-time solution method of the kinematics of the space manipulator according to the present invention, including a module for solving sine and cosine, a module for forward solution, a module for solving Jacobian matrix, a module for calculating inversion, and a module for solving joint angular velocity. The sine and cosine values of the angles of each joint of the manipulator are calculated by the sine and cosine module, and input to the forward solution module to solve each homogeneous transformation matrix, and then in the Jacobian matrix module, the Jacobian matrix relative to the end coordinate system is calculated through the homogeneous transformation matrix For each column of , the Jacobian matrix relative to the base coordinate system and a full-rank square matrix can be obtained through calculation...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More