

An automatic fluke support device for a flexible minimally invasive surgical manipulator
A minimally invasive surgery and support device technology, applied in the field of surgical robots, can solve the problems of small bearing capacity, large end point deflection, and low positioning accuracy, and achieve the effects of avoiding damage, reducing obstacles, and improving maneuverability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments. The following is an introduction to preferred embodiments of the present invention, which are merely illustrations of the present invention, rather than limitations to the present invention and its application or use. Other implementation modes obtained according to the present invention also belong to the technical innovation scope of the present invention.
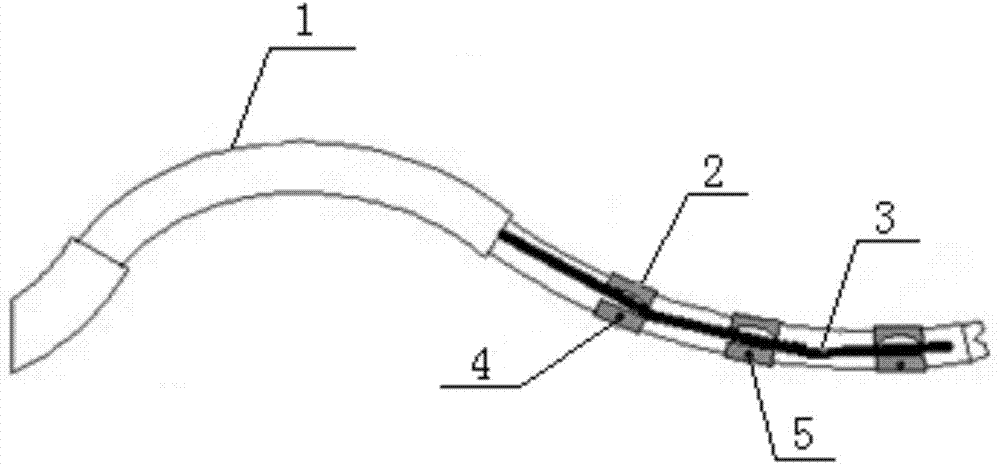
[0023] Such as figure 1 with figure 2 As shown, an automatic fluke support device applied to a manipulator for minimally invasive surgery of the spine, which provides a working support point for the manipulator body 1, is characterized in that the manipulator body 1 is a nickel-titanium alloy flexible hollow tube, and the The device includes anchor fluke 2, metal heating wire 3, temperature sensor 4, infrared sensor 5 and controller. The anchor fluke is made of nickel-titanium alloy ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More