

Heavy-load precise double-arm manipulator with arms cooperating with each other in space
A kind of manipulator, precise technology, applied in the direction of manipulator, program-controlled manipulator, manufacturing tool, etc., can solve the problem that the manipulator cannot reach the load and accuracy, low collaborative work ability, and the load capacity decline, so as to solve the contradiction between load capacity and accuracy performance. , high efficiency and safety performance requirements, the effect of strong load capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
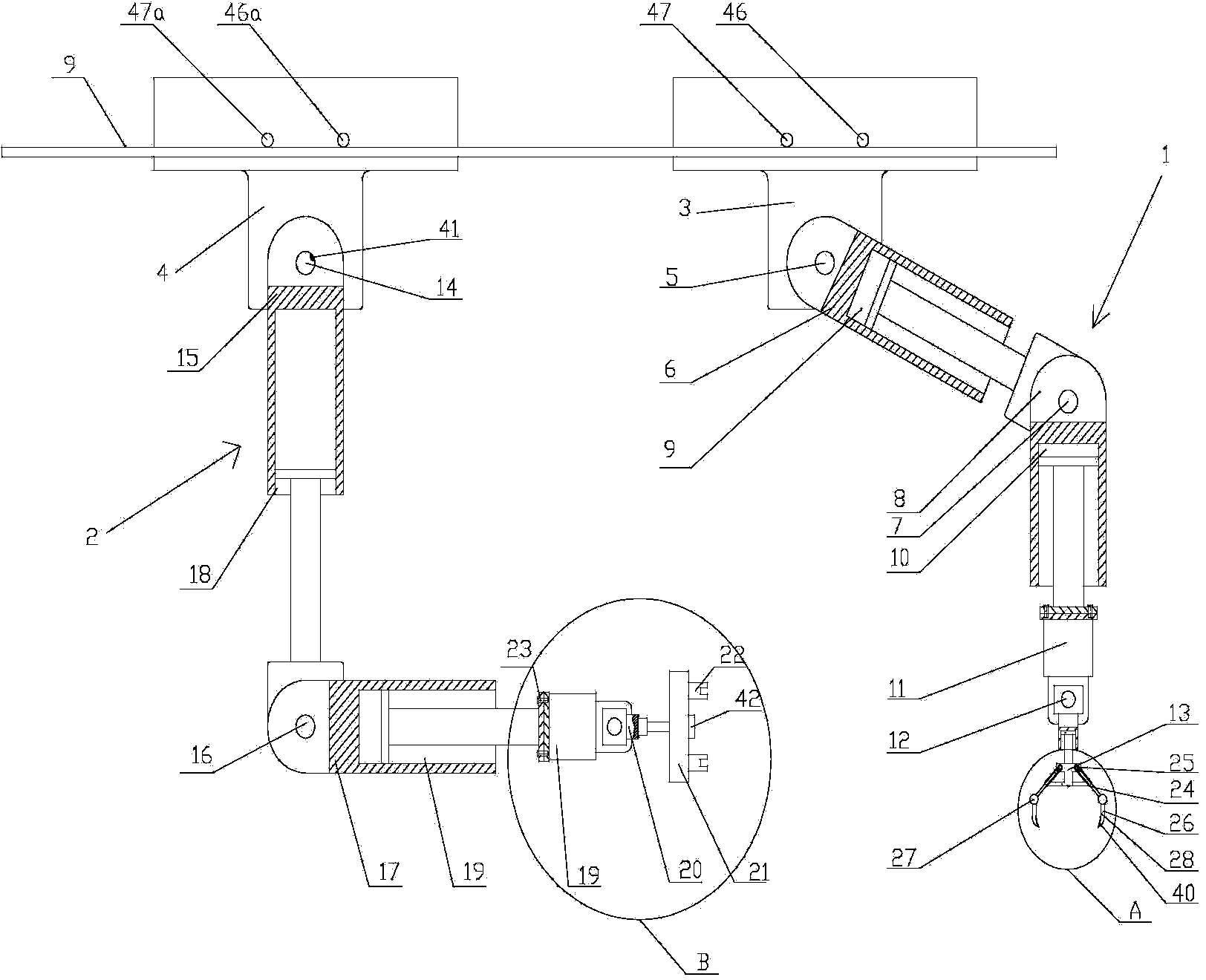
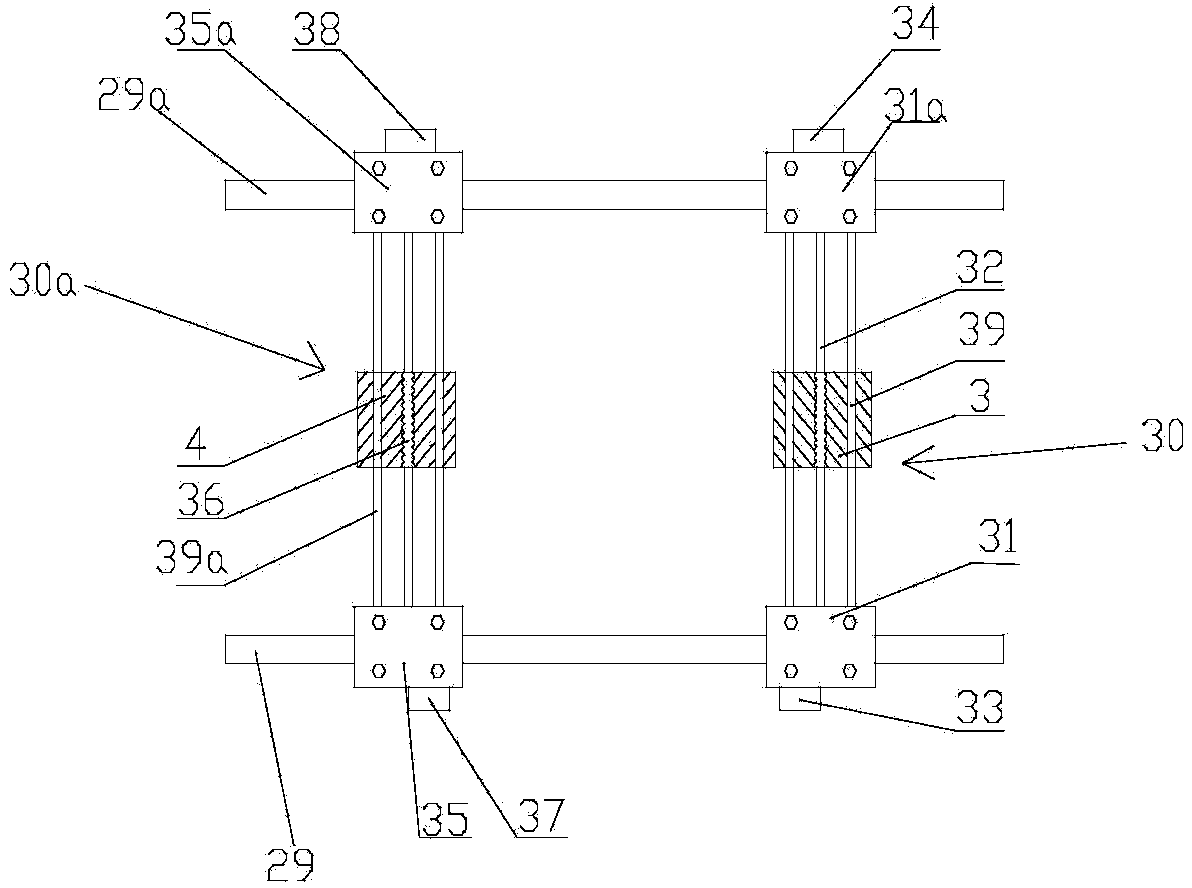
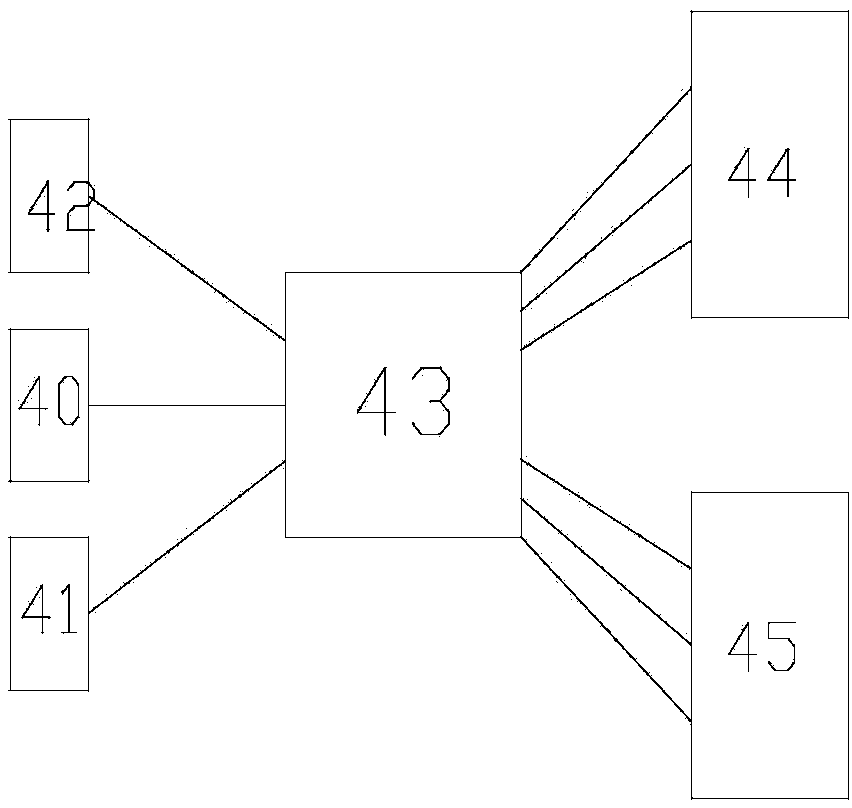
[0030] figure 1 It is a schematic diagram of the structure of the present invention, figure 2 is a schematic diagram of the linkage guide rail assembly, image 3 It is a flow diagram of the automatic control system, Figure 4 for figure 1 The enlarged schematic diagram at A, Figure 5 for figure 1 The enlarged schematic diagram at B, Image 6 It is a schematic diagram of the structure of the arm drive device, as shown in the figure: the spatial cooperation heavy-duty precision double-arm manipulator of this embodiment includes a linkage guide rail assembly, a load manipulator 1 for loading heavy objects, and an auxiliary positioning machine for ensuring the positioning accuracy of the workpiece manipulator 2;
[0031] The linkage guide rail assembly at least includes a slider I3 for installing a load manipulator and a slider II4 for installing an auxiliary positioning manipulator;
[0032] The load manipulator includes shoulder joint I5, upper arm I6, elbow joint I7, l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More