

A bionic finger with controllable flexibility
A technology of flexibility and fingers, applied in the field of bionic fingers, can solve problems such as damage, inability to protect itself, and difficulty in achieving compliant grip, and achieve the effect of improving the ability to coordinate with each other
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
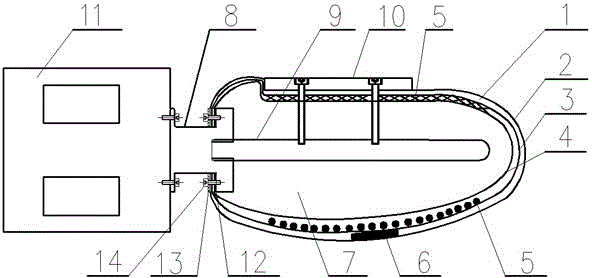
[0018] exist figure 1 Among them, the bionic finger with controllable flexibility includes: bionic skin 1, electromagnetic coil 5, strain gauge sensor 6, magnetorheological fluid 7, sealing boss 8, rigid support body 9, nail seat 10, finger control box 11 , a sealant 12, a sealing washer 13, and a set screw 14; the bionic finger with controllable flexibility is mainly composed of a bionic finger cortex structure, a bionic finger internal structure and a bionic finger circuit structure.
[0019] The structural features of the bionic finger with controllable flexibility mainly include: the main features of the bionic finger cortex structure are: the bionic skin 1 is made of silicone rubber cast into a finger shape, and has three layers, the inner layer of the bionic skin 4, and the middle layer of the bionic skin 3 , the outermost layer of the bionic skin 2; the inner layer of the bionic skin 4, the surface of which is evenly wound with a copper electromagnetic coil 5, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More