

Muscle strength model optimizing method for humanoid robot synergic movement
A technology of collaborative motion and optimization method, which is applied in the directions of instruments, 3D modeling, image data processing, etc., can solve the problems of model accuracy distortion, lack of joints, accuracy of skeletal muscle simulation model, etc., and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] Preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
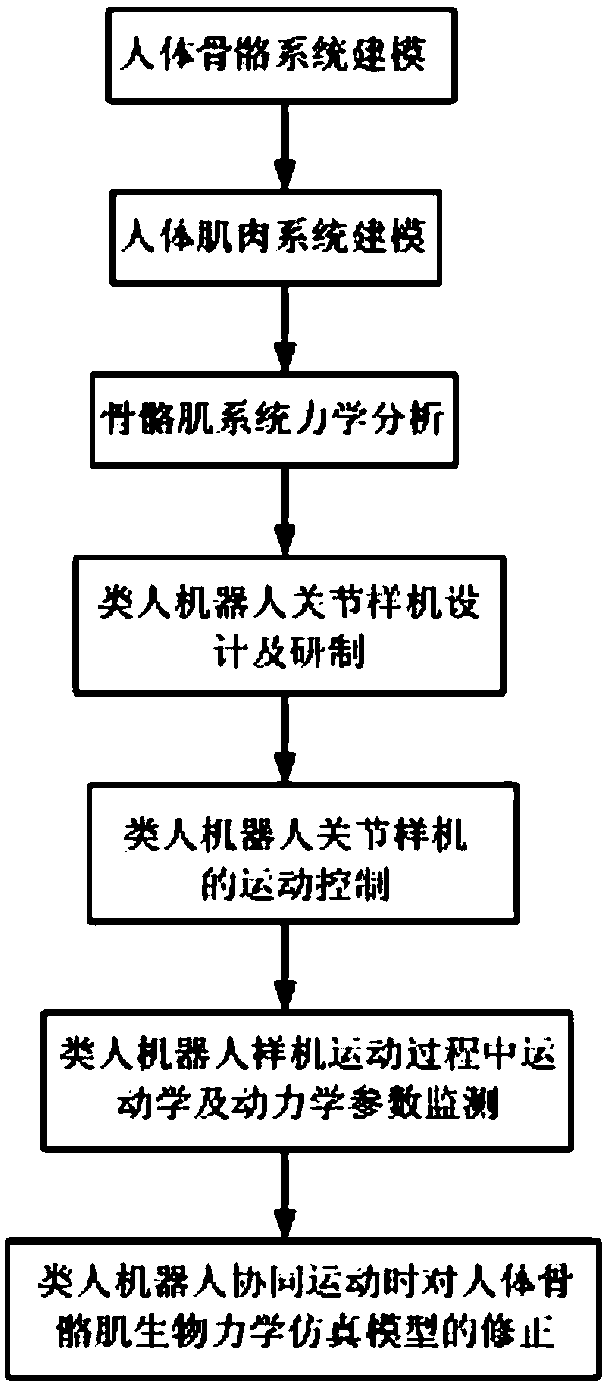
[0038] Such as figure 1 and figure 2 As shown, this embodiment provides a method for optimizing a muscle force model of a humanoid robot cooperative movement, comprising the following steps:
[0039] Step 1, modeling of the human skeletal system: scan the human skeletal muscle system of the reference subject by using CT technology, and reconstruct the human skeletal system with three-dimensional graphics through computer graphics processing.
[0040] Step 2: Modeling of the human muscle system: use the most widely used muscle action line method to model human muscles. At the same time, when using the action line to build a muscle model, there are three muscle path construction methods, which are straight line path, setting The discounted path of the stop point and the curvilinear path of obstacles are selected. According to the characteris...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More