

Vertical take-off and landing control method for quad-tilt-rotor unmanned aerial vehicle
A tilting quadrotor, vertical take-off and landing technology, applied in attitude control and other directions, can solve the problem of difficult control of tilting rotor drones, and achieve good control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the accompanying drawings.
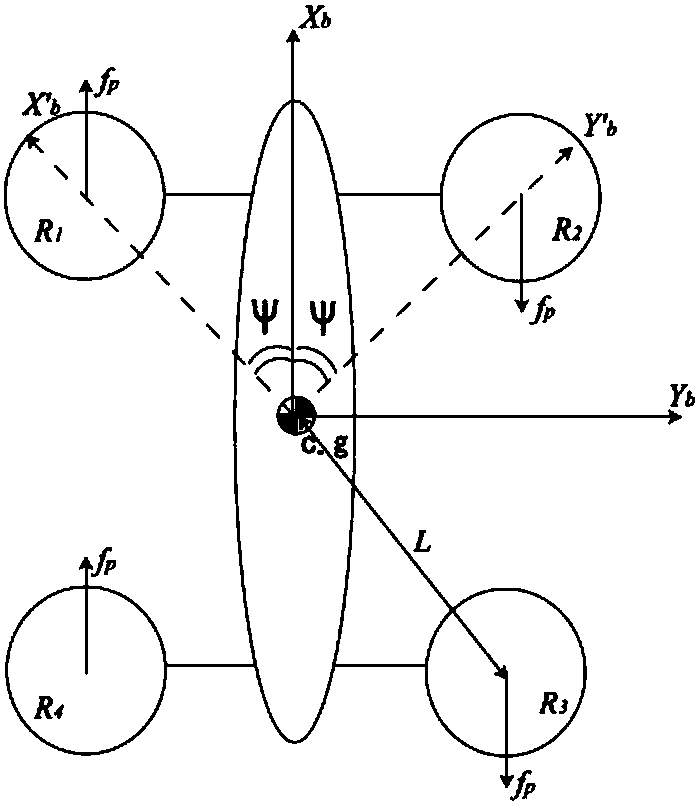
[0028] Such as figure 1 As shown in , the four rotors of the aircraft are at the same distance from the center of mass of the body. f p is the deflection force produced by the airflow on the aileron. f p and the airflow velocity, deflection angle Θ of each aileron fp relevant. Assume that when yawing, the roll angle and pitch angle of the aircraft are both 0°, so the rotation speed of the four rotors remains unchanged; in this way, the effect of airflow changes is negligible compared with the effect caused by the aileron deflection angle. From the above assumptions, f p only subject to Θ fp Impact. Let M z is the yaw moment, L is the distance from the center of the wing to the center of mass, and the ray formed from the center of mass of the body to the center of the rotor forms an angle Ψ of 45° with the direction pointed by the nose. A moment produced by an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More