Pitching and heaving proportion-differential control method for wave-piercing catamaran
A differential control, catamaran technology, applied in the controller, attitude control, electric controller and other directions with specific characteristics, can solve the complex method, the vertical heave improvement is not obvious, the pitch and roll of the wave piercing catamaran is not obvious. The heave characteristic effect is not ideal, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be described in detail below with reference to the accompanying drawings and examples.
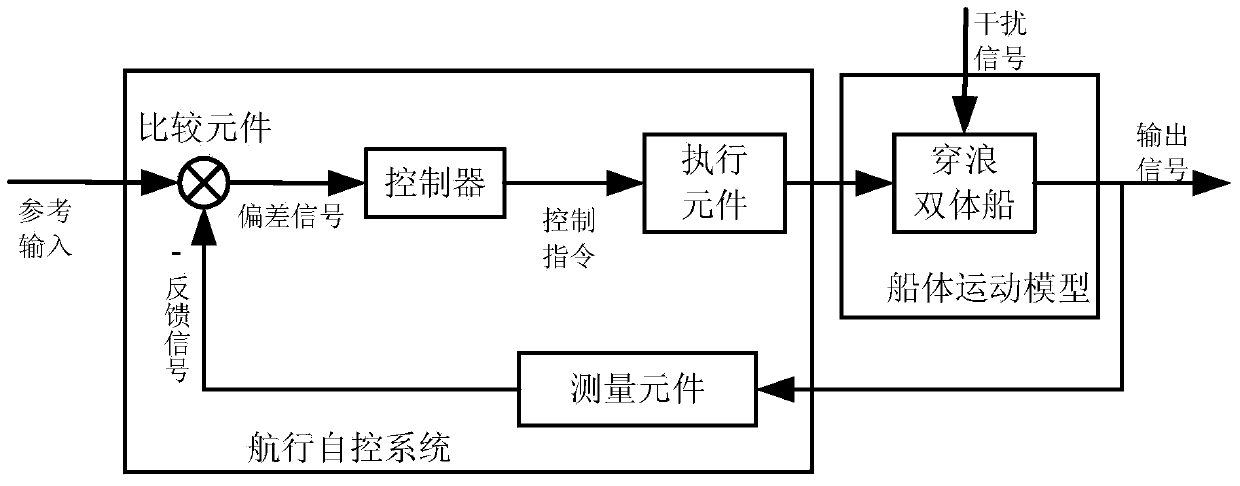
[0026] The invention provides a proportional-differential control method for the pitch and heave of a wave-piercing catamaran, which utilizes the change of the force on the front and rear actuators of the hull under the condition of different attack angles in the sailing state, and automatically adjusts and installs Obtain the control force at the angle of attack of the front and rear actuators, change the stress state of the wave piercing catamaran under wave conditions, reduce the swing and heave effect of waves on the wave piercing catamaran, thereby reducing its pitch And heave, improve its seaworthiness and comfort, the control method is simple to implement, the anti-rolling effect is obvious, and it occupies less overall resources.
[0027] This method adopts the proportional-derivative control method to perform direct proportional-derivative control...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More