Master slave minimal invasive blood vessel interventional surgical assistant system
A technology of interventional surgery and auxiliary system, applied in the field of master-slave minimally invasive vascular interventional surgery auxiliary system, which can solve problems such as propulsion error, indiscriminate force direction, and vascular injury
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
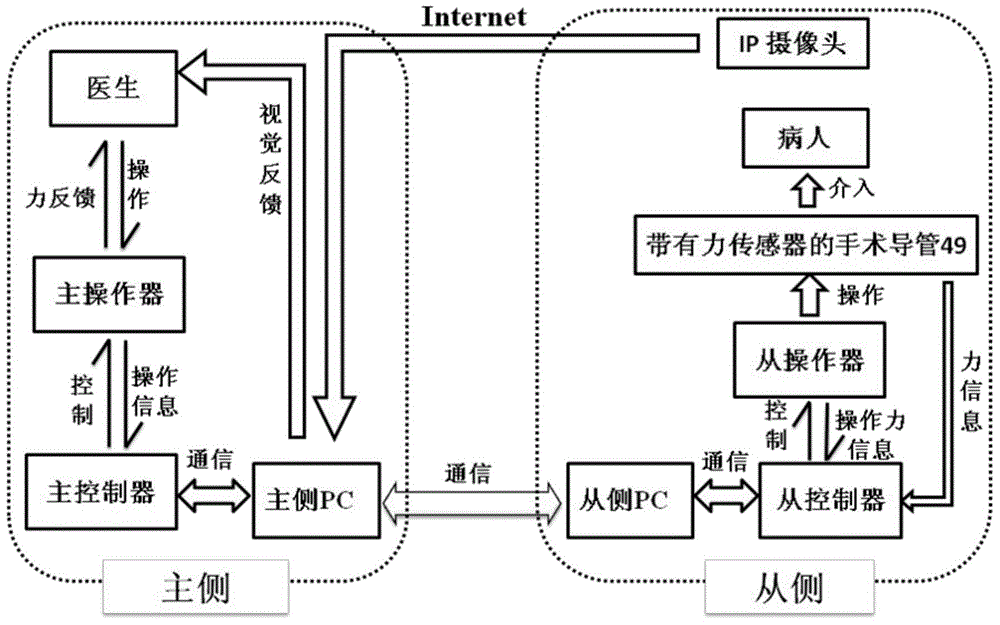
[0089] Embodiment: a kind of master-slave minimally invasive vascular interventional surgery auxiliary system (see figure 1), characterized in that it is composed of a master side part and a slave side part; wherein, the master side part includes a master operator, a master controller and a master side PC; the slave side part includes an IP camera, a slave operator, Slave controller, slave side PC and surgical catheter 49; the input end of the master operator receives the doctor's operation signal and the feedback control signal of the master controller, and its output end is connected with the input end of the master controller and provides the operator with Force feedback; the input terminal of the main controller receives the operation information of the main operator and the feedback information of the main side PC, its output terminal is connected with the input terminal of the main operator, and the output is passed to the feedback control signal of the main operator, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com