

Calibration method and device for robot hole forming platform vision measurement system
A robotic hole-making and visual measurement technology, applied in automatic control devices, feeding devices, measuring/indicating equipment, etc., can solve problems such as large errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
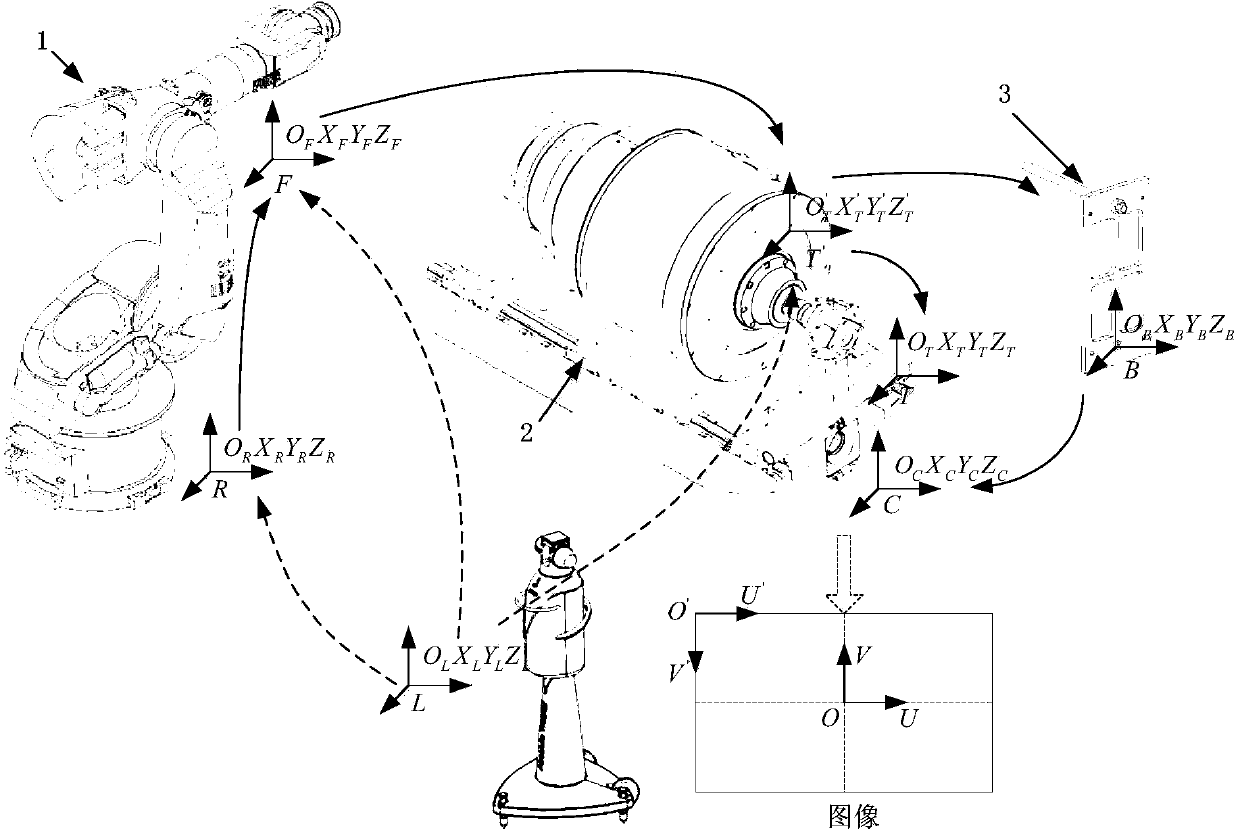
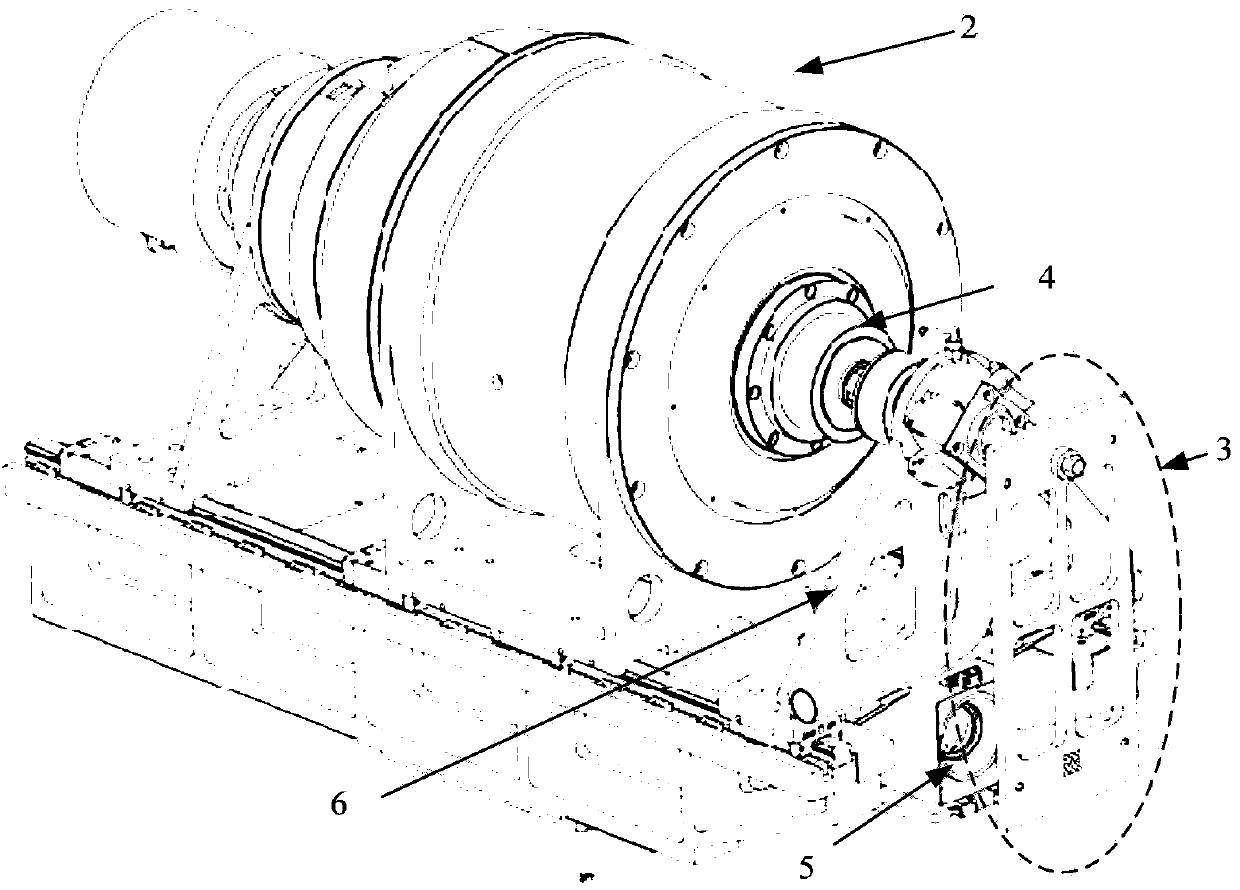
[0073] like figure 1 and figure 2 As shown, a calibration device for the visual measurement system of the robot hole-making platform, the calibration device 3 is installed on the end effector 2 of the hole-making robot 1, the hole-making tool is mounted on the main shaft 4 of the end effector 2, and The end effector 2 is provided with a camera 5 facing the calibration device 3; figure 1 The hole-making robot 1, end effector 2, and calibration device in the figure have unequal drawing scales, and the size of the device in the picture is not used to limit the actual device. This figure is only used to illustrate the positional relationship of each coordinate system.
[0074] According to the structure and size of the helical milling end effector 2 used in the present invention, combined with the functional requirements to realize the camera calibration and hand-eye calibration, the processing and design are as follows: image 3 The calibration device 3 shown includes a spindl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More