

Integrated navigation system fault diagnosis method based on Gaussian process regression
A technology of Gaussian process regression and integrated navigation system, applied in the direction of measuring devices, instruments, etc., can solve the problems of high error rate of detection results and low detection sensitivity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] The present invention will be further explained below in conjunction with the accompanying drawings.
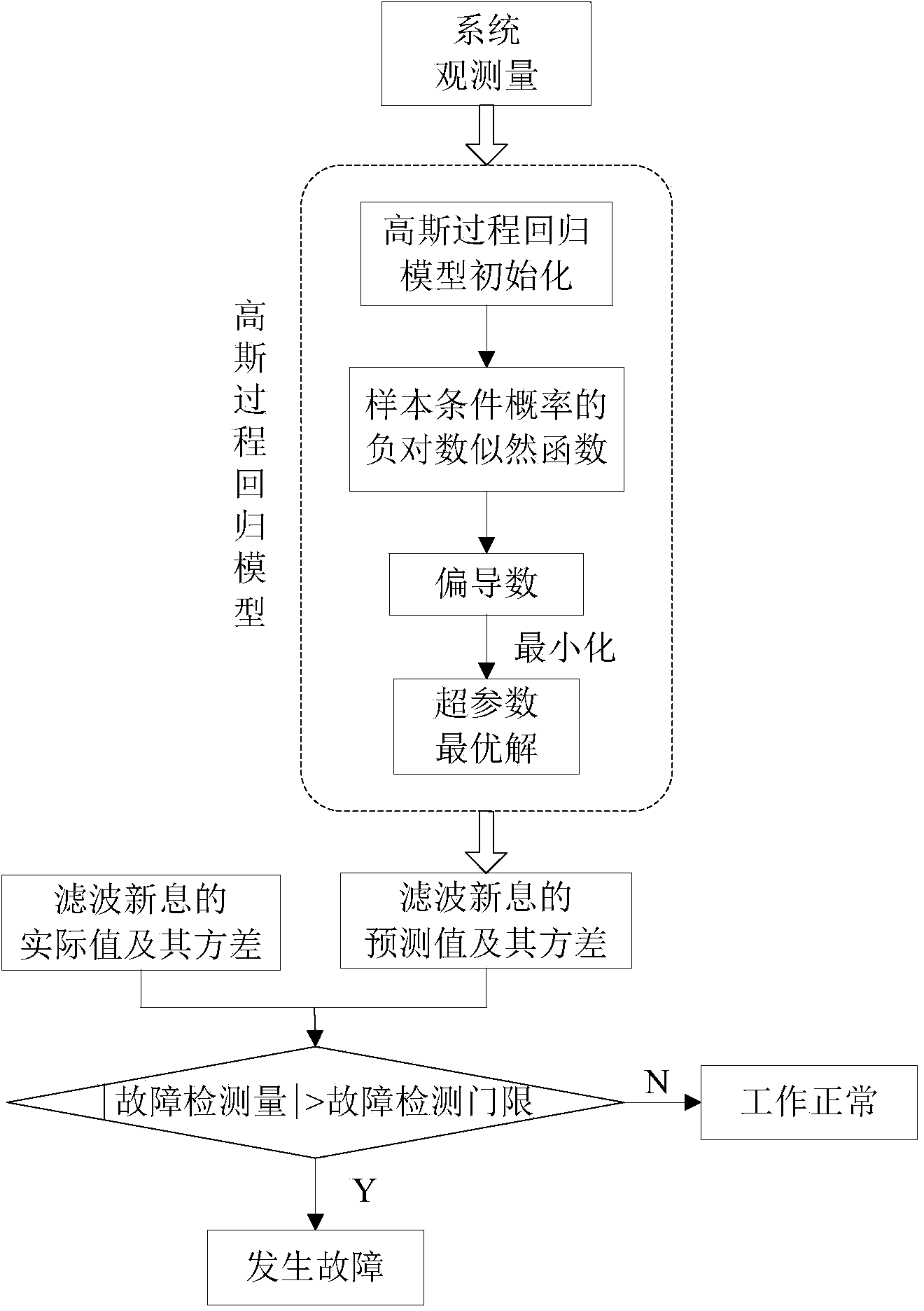
[0069] The present invention can be better understood from the following examples. Such as figure 1 As shown, a kind of Gaussian process regression based integrated navigation system fault diagnosis method of the present invention, concrete steps are as follows:
[0070] Step 1) Collect the system observation Z={Z when the sensor is fault-free k |k=1,2,...n} and its corresponding Kalman filter innovation R={r k |k=1,2,…n} as samples, and set fault detection threshold λ 0 ;
[0071] Step 2) Gaussian process regression model initialization: set the covariance function and the initial value of the hyperparameter, and use the mean square index covariance function; the variable Z p with Z q The mean square exponential covariance function for :
[0072] k ( Z p , Z ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More