

Anti-interference attitude control method suitable for miniaturized unmanned aircraft
An unmanned aerial vehicle and attitude control technology, applied in the direction of attitude control, adaptive control, general control system, etc., can solve the problems of not considering external interference, not resisting external interference, and difficult to guarantee the control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0074] Now in conjunction with the accompanying drawings, the specific implementation of the anti-jamming attitude control method applicable to small unmanned aerial vehicles of the present invention will be further described:
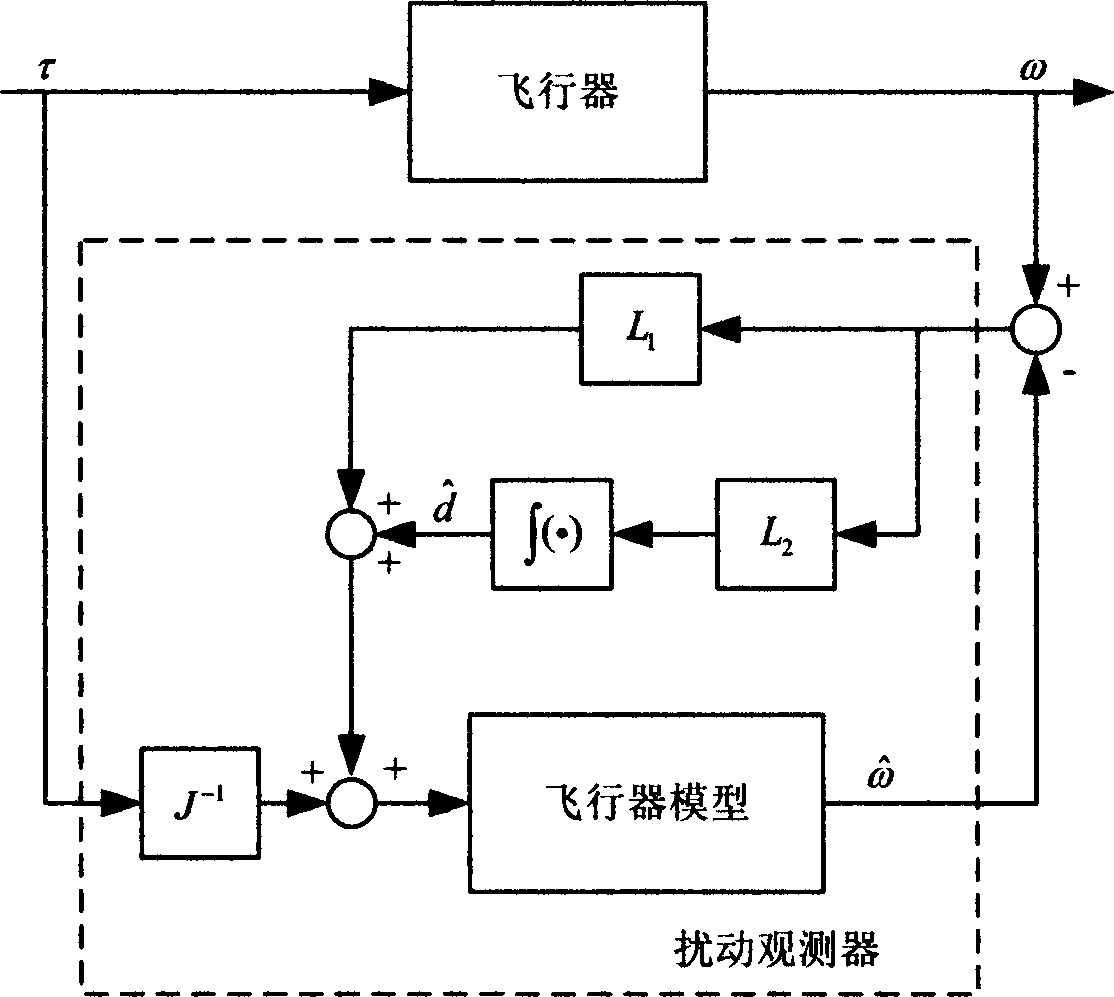
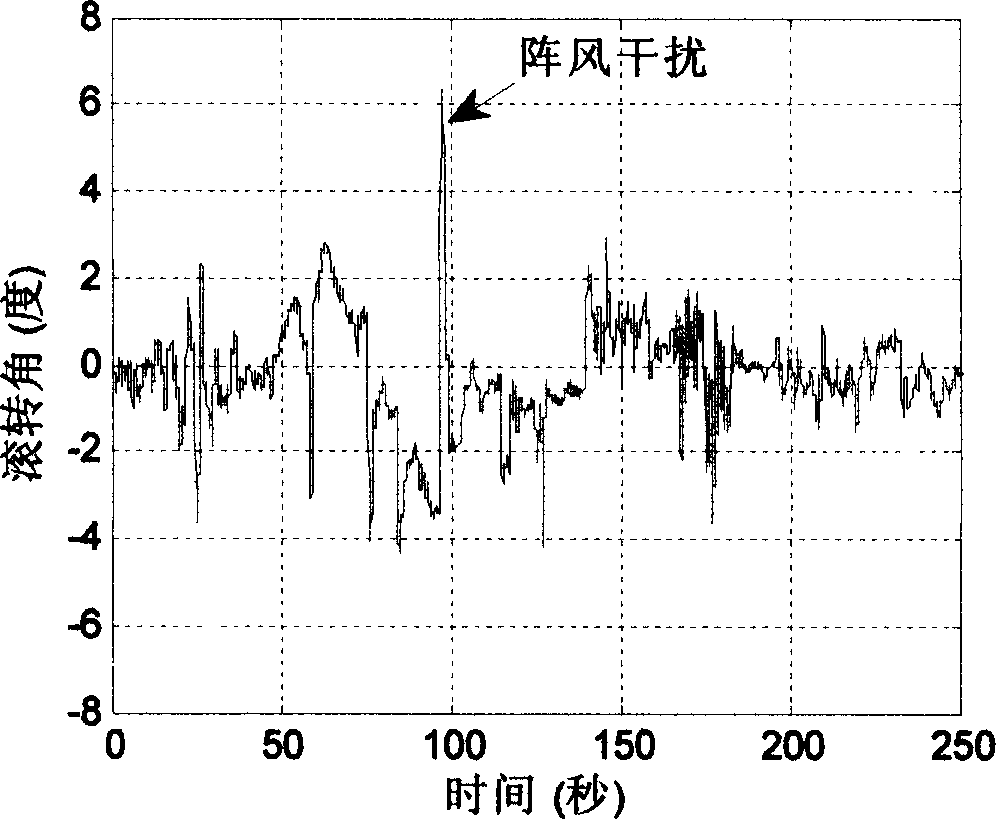
[0075] In this embodiment, it is described in detail that for a specific four-rotor flying platform, a mathematical model is established and decomposed, a disturbance observer and an integral backstepping attitude controller are designed, and the anti-interference attitude controller is formed by combining the two and its stability is analyzed. The value criterion of the control parameters is derived, so as to realize the stable control of the attitude of the aircraft in the presence of continuous and time-varying external disturbances. Specific steps include:
[0076] Step 1: Aircraft Modeling and Model Decomposition
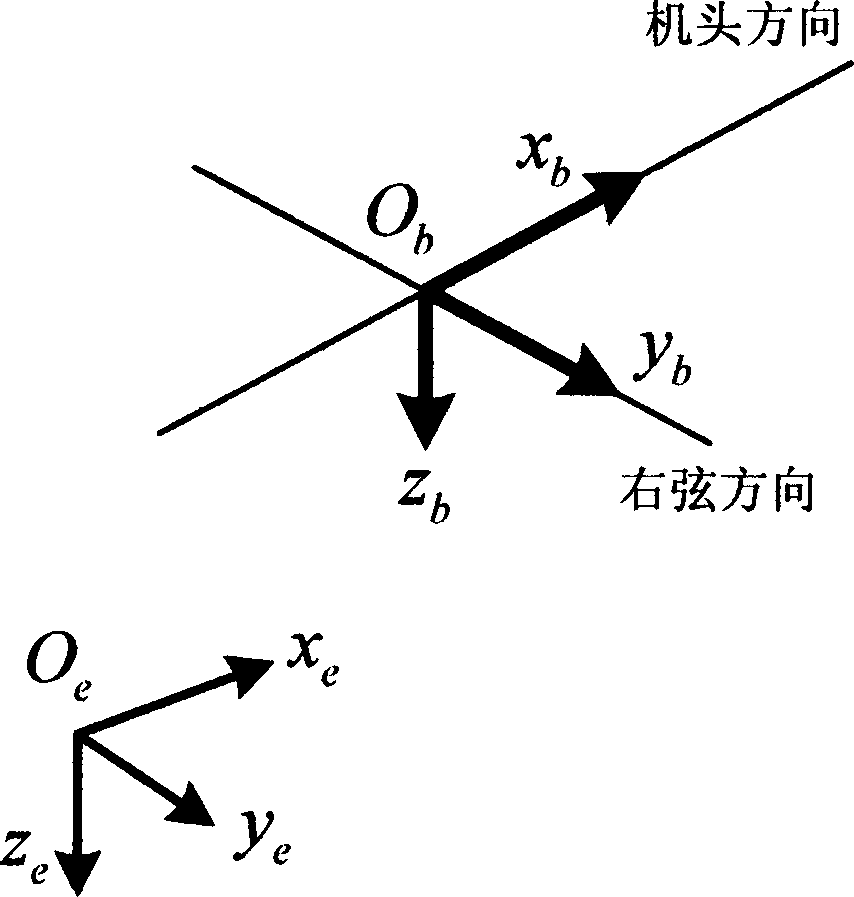
[0077] Consider the quadrotor aircraft as a rigid body, and establish a body fixed coordinate system B={O b x b the y b z b} and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More