

Tracked intelligent traveling-on-wall platform
A crawler type, platform technology, applied in crawler vehicles, motor vehicles, transportation and packaging, etc., can solve the problems of increased risk, complex mobile carrier mechanism, increased robot mass, etc., to expand vacuum space and enhance controllability , Improve the sealing effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
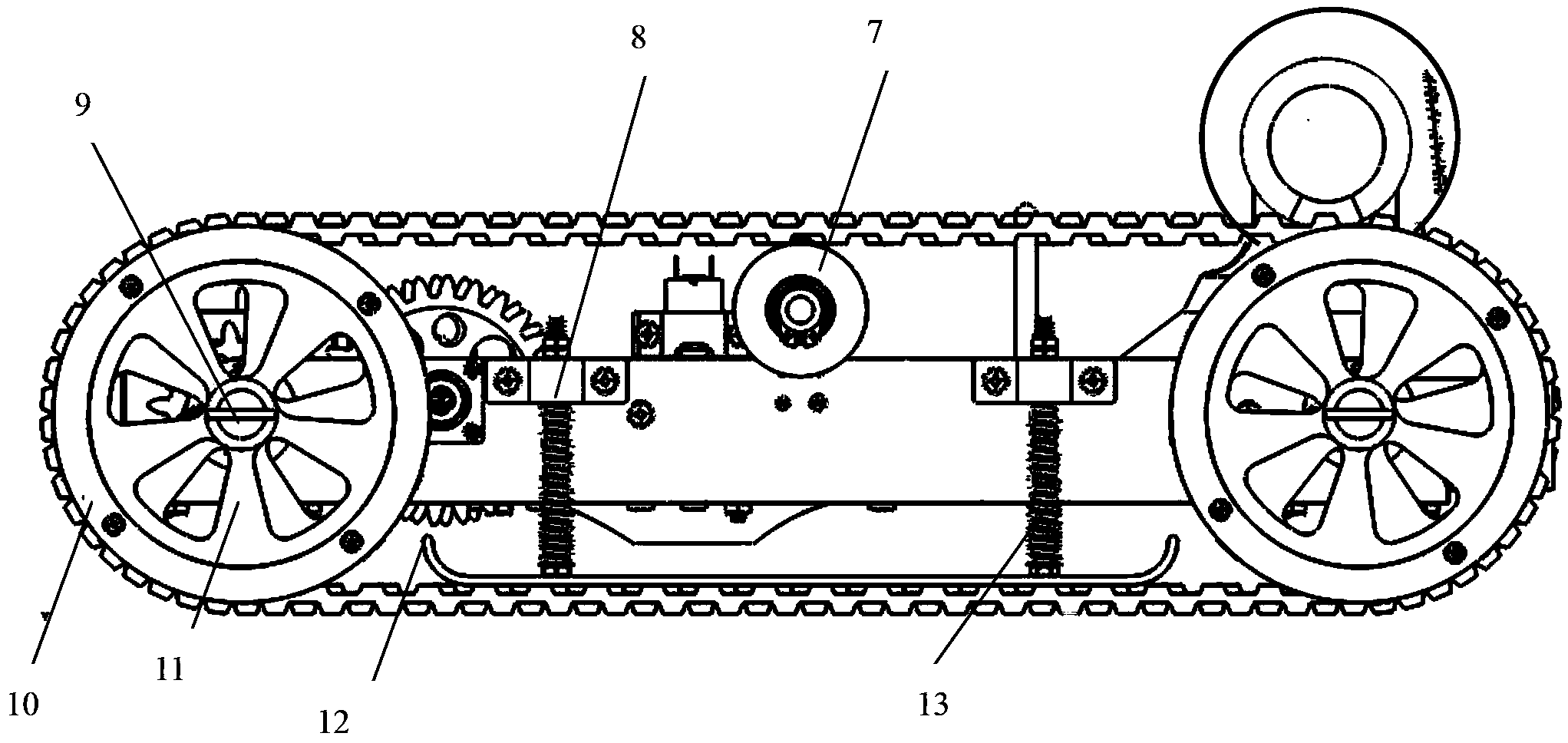
[0025] A. The structure and assembly of the walking system:
[0026] as attached image 3 And attached Figure 5 As shown, the walking system consists of a timing belt (15), a timing wheel (11), a block (10), a fixing screw (9), a tensioning wheel (7), a pressure belt plate (12), a spring (13), a bracket (8) and other components. The synchronous belt is meshed with the synchronous wheel, and the synchronous belt is adjusted through the tension wheel and the belt pressure plate to make it in the best working condition.
[0027] B. Structure and assembly of the adsorption system:
[0028] as attached Image 6 , attached Figure 7 And attached Figure 8 shown. The adsorption system is mainly composed of suction motor (30), sleeve frame (40), motor base (32), motor base bracket (33), coupling (39), fixed impeller (29), moving impeller (35), outer cover (36), lock nut (38), lock washer (37) and other components. The fixed impeller is fixedly connected with the car body, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More