

Six-degree-of-freedom Delta robot transmission mechanism
A transmission mechanism and robot technology, applied in the field of robots, can solve the problems of burden, increased load of the main drive motor, large motion inertia, etc., and achieve the effects of improving work efficiency and frequency, reducing protection requirements, and reasonable overall structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
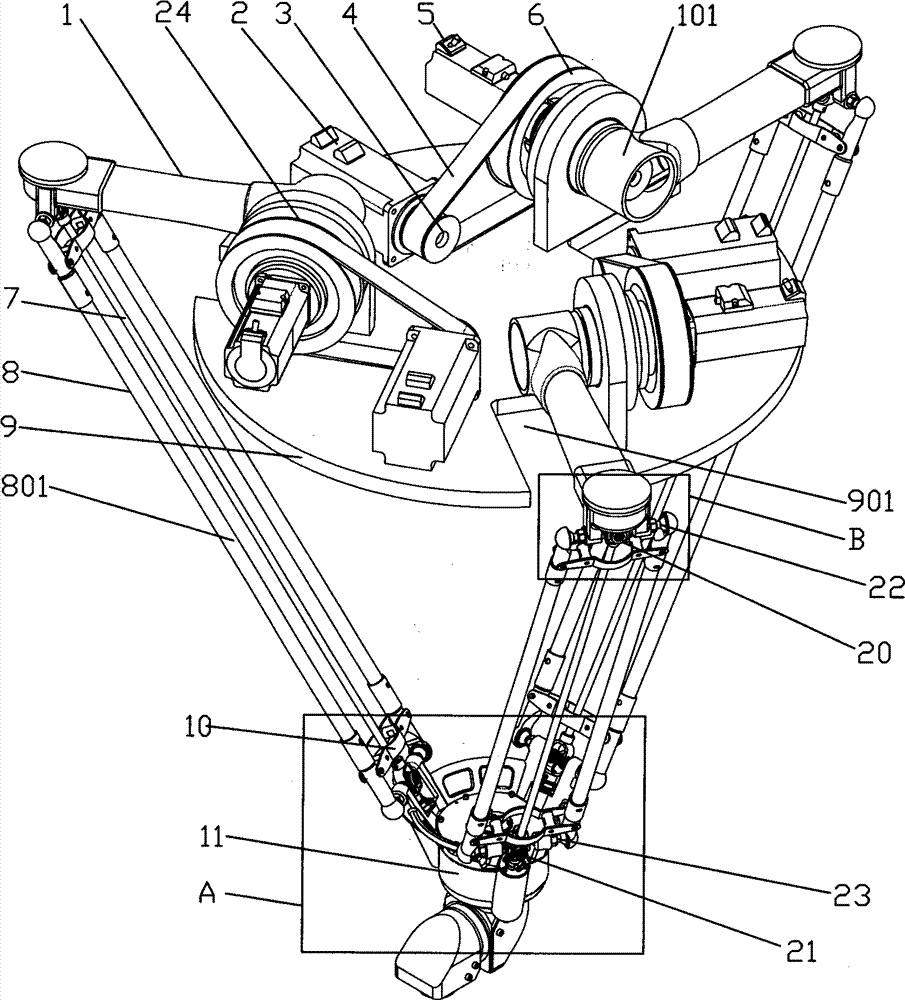
[0025] Specific implementation mode one: as figure 1 , Figure 4 ~ Figure 10 As shown, the six-degree-of-freedom Delta robot transmission mechanism includes a body platform 9, three hollow main motion arms 1 (also known as one, two, and three axes, which of the three hollow main motion arms 1 is used as one, two or three axis, determined according to needs), three active drive transmission mechanisms, three auxiliary staggered shaft drive transmission mechanisms, three parallelogram linkages 8 and four, five, six axis transmission mechanisms, one end of the main movement arm 1 A fixed sleeve 101 is provided; the three active drive transmission mechanisms all include the main drive motor 2 and the main drive synchronous belt transmission mechanism 24, and the three auxiliary staggered shaft drive transmission mechanisms all include the auxiliary drive motor 5, the auxiliary drive Synchronous pulley 12, arm end seat 17, auxiliary rotation passive synchronous pulley 18 and auxil...
specific Embodiment approach 2
[0027] Specific implementation mode two: as figure 1 , Figure 9 As shown, in the six-degree-of-freedom Delta robot transmission mechanism described in Embodiment 1, each parallelogram linkage mechanism 8 includes two long columns 801 and two leaf springs 10; the two long columns 801 are arranged in parallel on two Inside the leaf spring 10 , and two leaf springs 10 are arranged in parallel at both ends of the two long columns 801 , and the two leaf springs 10 are hinged to the two long columns 801 .
specific Embodiment approach 3
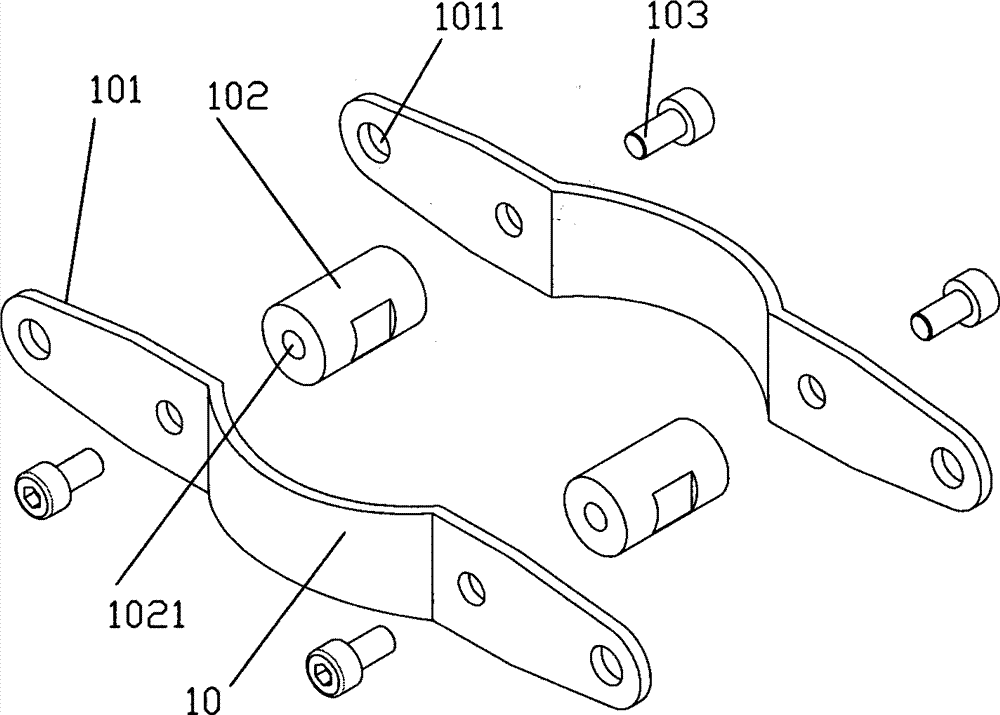
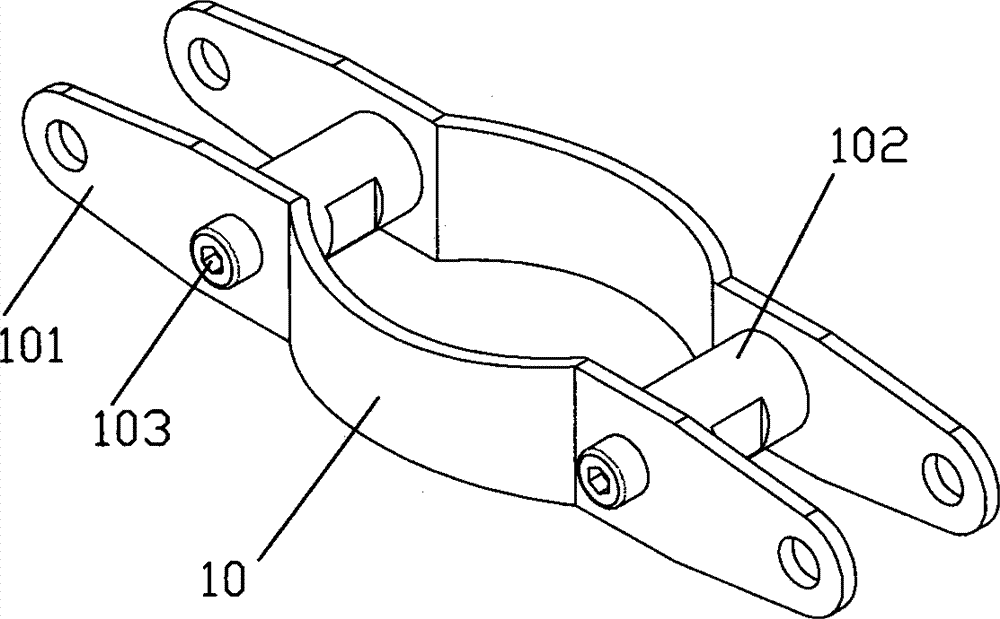
[0028] Specific implementation mode three: as figure 2 , image 3 As shown, in the six-degree-of-freedom Delta robot transmission mechanism described in Embodiment 2, each leaf spring 10 includes two steel plates 101, two connecting plate columns 102 and four hexagon socket bolts 103; the two steel plates 101 are arranged in parallel , two connecting plate columns 102 are arranged in parallel between two steel plates 101, each connecting plate column 102 is provided with a central screw hole 1021 along the length direction, each steel plate 101 corresponds to the central screw hole 1021 of the connecting column 102 A connection hole 1011 is provided at the position, and each steel plate 101 is threadedly connected with the central screw hole 1021 of the connecting plate column 102 through the hexagon socket head bolt 103 penetrating into the connection hole 1011 .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More