

Method for designing fuzzy PI controller of Delta robot movement mechanism
A technology of motion mechanism and design method, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as inaccurate control, limited ability of PI controller to deal with system uncertainty, instability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
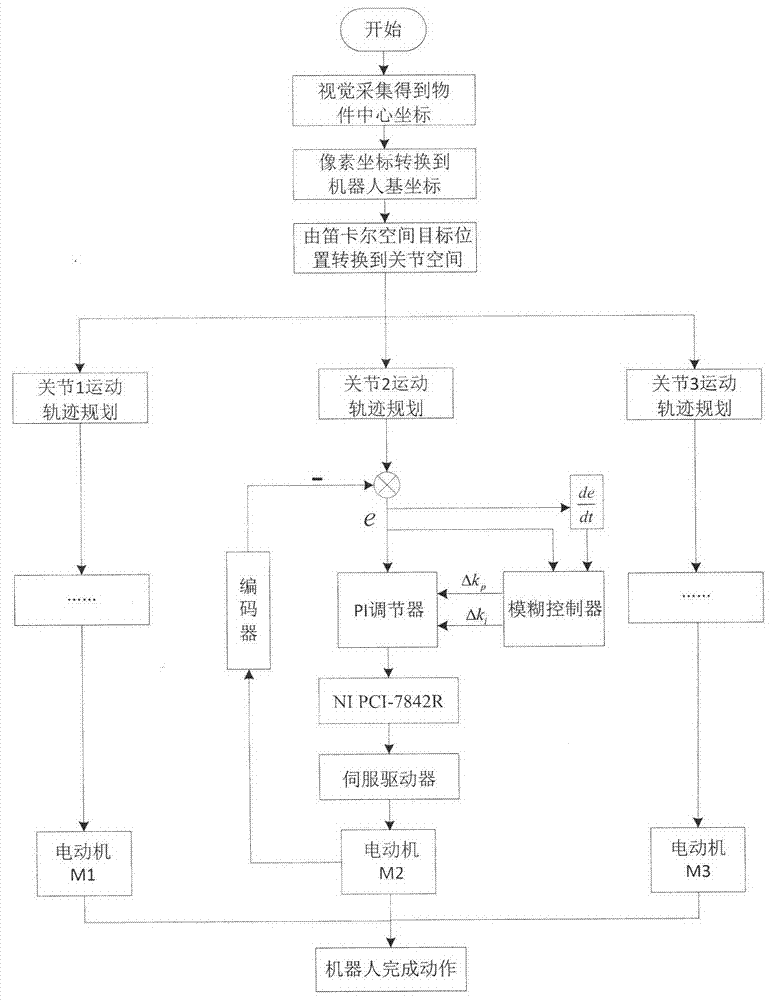
[0039] The specific steps are:
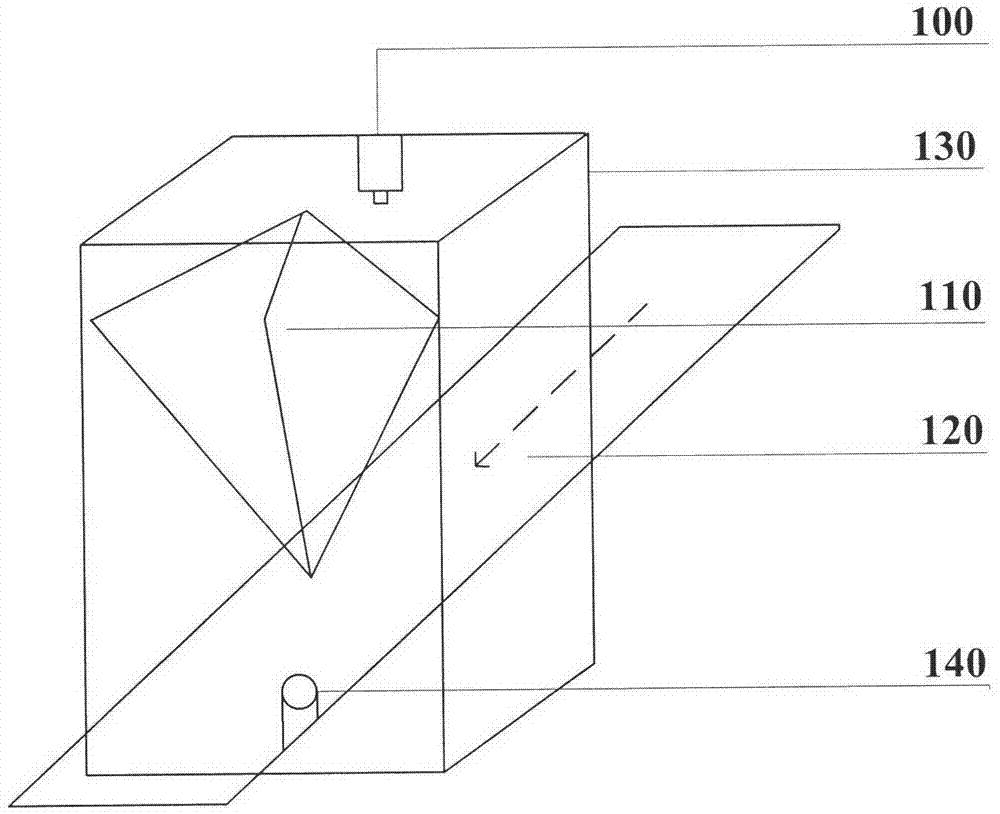
[0040] (1) Install the Delta robot in the three-dimensional steel structure bracket, and establish the camera coordinate system and the robot base coordinate system, and convert the object coordinates recognized by the industrial smart camera to the robot's base coordinate system
[0041](1.1) four-degree-of-freedom Delta robot 110 is installed in the three-dimensional support 130, and the four-degree-of-freedom Delta robot 110 can move in the three-dimensional support 130; The front end of the three-dimensional support 130 adopts a global mode to install the industrial smart camera 100, the three-dimensional support 130 A conveyor belt 120 is arranged inside, and the motion direction of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More